

Design and implementation of a modular and reconfigurable underwater robot
-
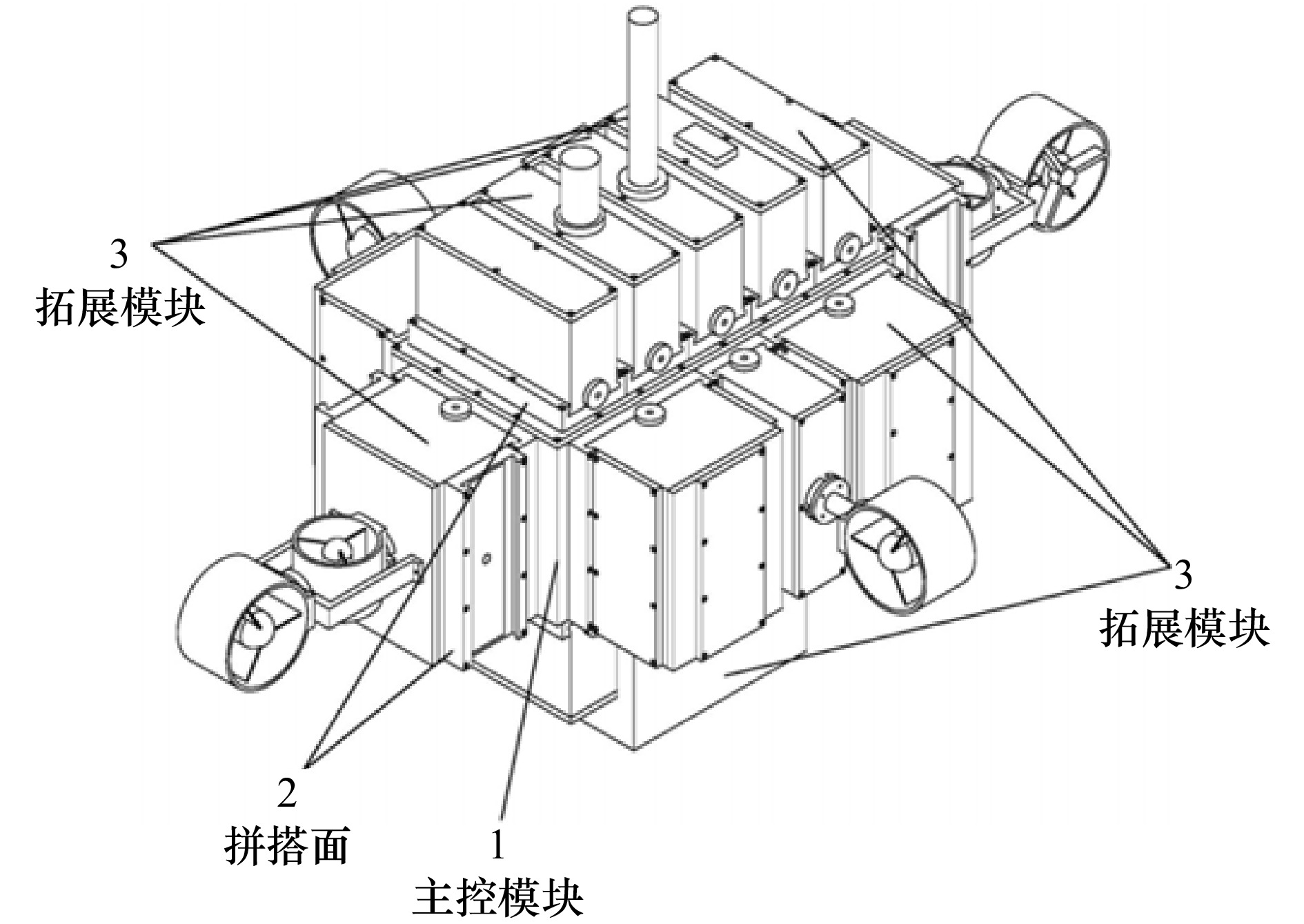
摘要: 为使水下机器人(Unmanned Underwater Vehicle, UUV)可以迅速适应不同应用场景,设计了一种模块化可拼搭组合的无人水下航行器。UUV采用长方体模块作为基本组成部件,通过无线电能与数据传输实现了模块间非电气接触式互联,避免了传统水密接插件的使用。模块设计为主控、拓展两种类型,可根据任务需求进行自由组合,并通过特殊的滑块与卡扣结构实现模块间快速装配与稳固连接。通过模块拼搭试验验证了模块间的拼搭拓展能力,通过水下试验验证了模块间通信和无线电能传输的可行性。无线电能传输测试显示,模块在水下环境中可稳定输出电压,满足设备运行需求。原理样机水下运行测试验证了整体方案的可行性。模块化可拼搭设计为UUV在各种应用场景中的灵活部署与功能扩展提供了广泛的可能性。Abstract: To enable underwater robots to quickly adapt to various application scenarios, a modular and reconfigurable Unmanned Underwater Vehicle (UUV) was designed. The UUV employs rectangular modules as its basic components, achieving non-electrical-contact interconnection through wireless power and data transmission, thereby eliminating the need for traditional watertight connectors. The modules are categorized into control and extension types, allowing flexible combinations based on task requirements. A specialized slider-and-clasp structure facilitates rapid assembly and secure connections between modules. Module interconnection and expansion capabilities were validated through modular assembly tests, and underwater experiments confirmed the feasibility of inter-module communication and wireless power transmission. Wireless power transfer tests demonstrated stable voltage output in underwater environments, meeting operational requirements. Prototype underwater operation tests further validated the feasibility of the overall design. This modular and reconfigurable design offers extensive possibilities for flexible deployment and functional expansion of UUVs in various application scenarios.
-
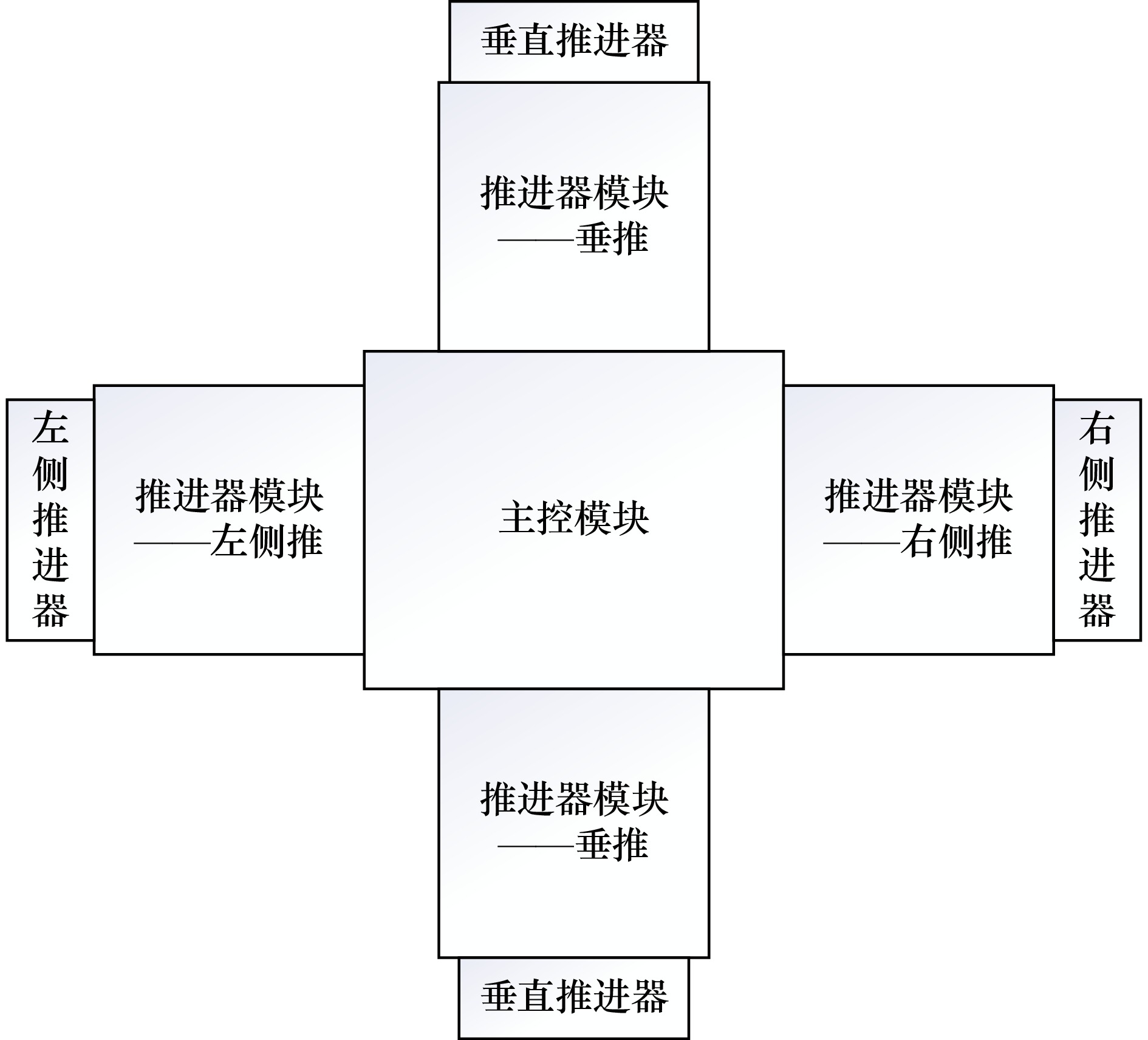
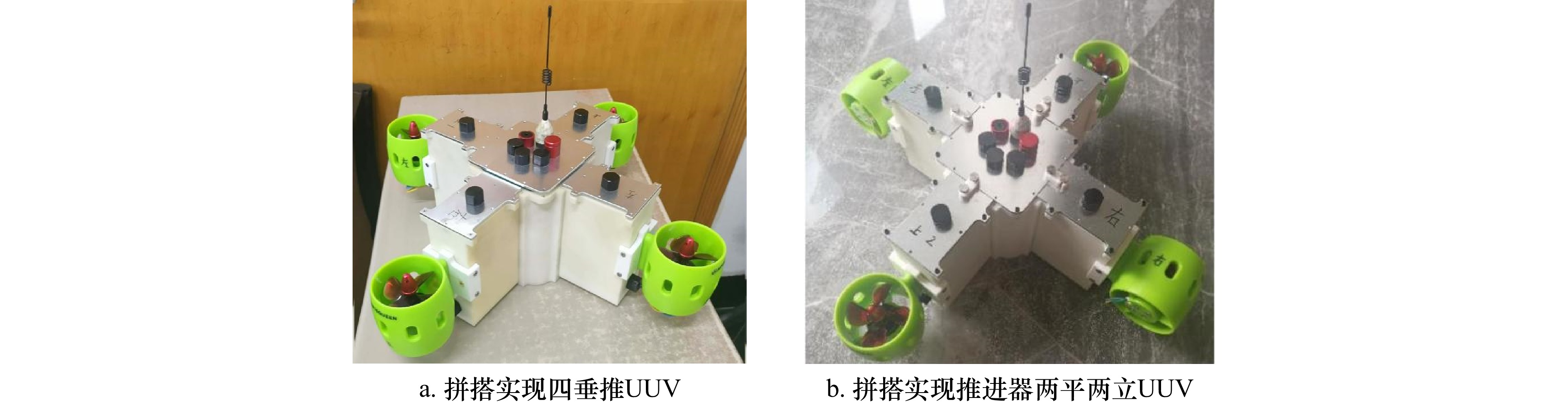
图 1 模块化可拼搭组合的水下机器人一种布局示意图
Fig. 1 One configuration of a modular and reconfigurable UUV
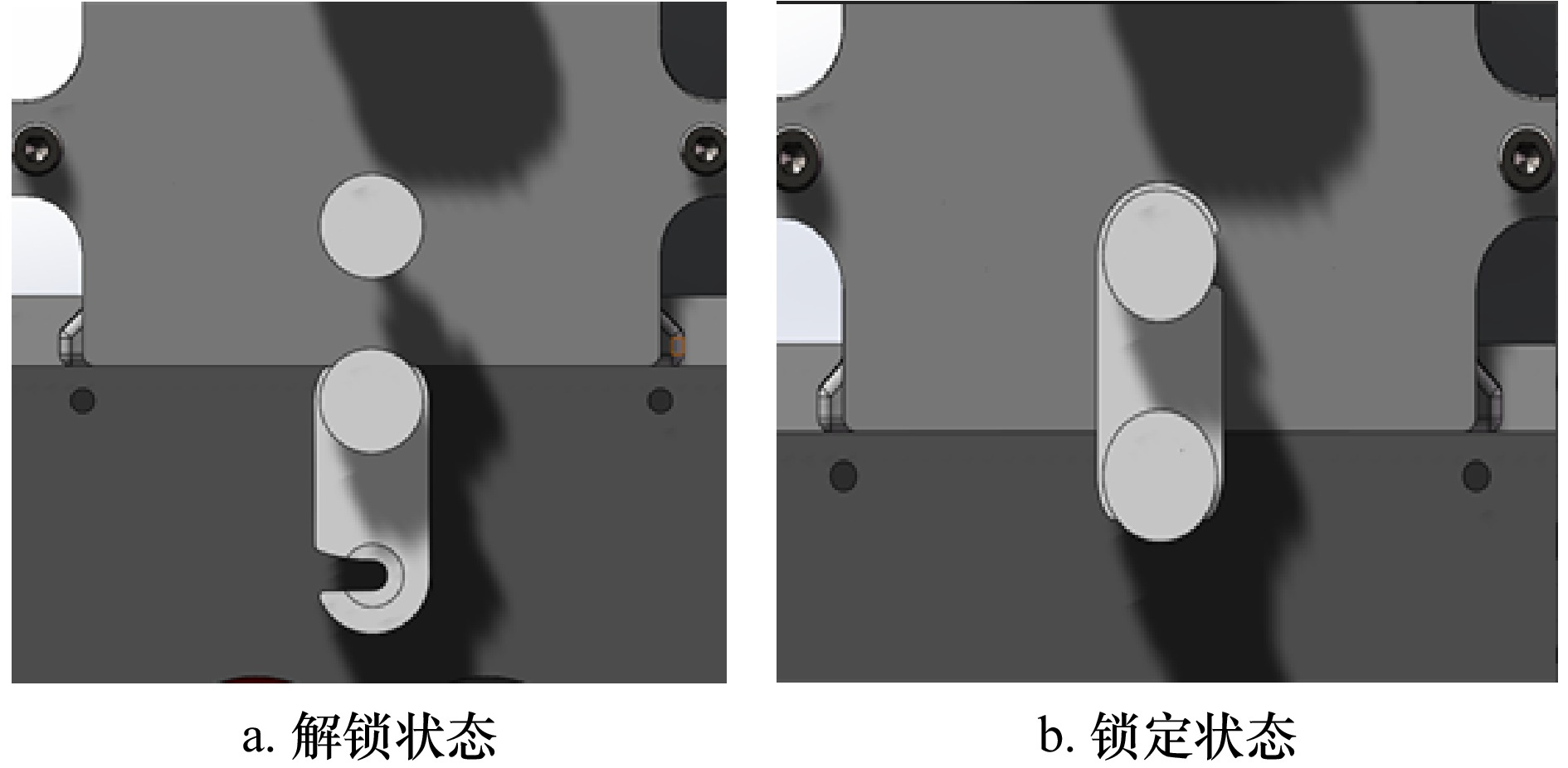
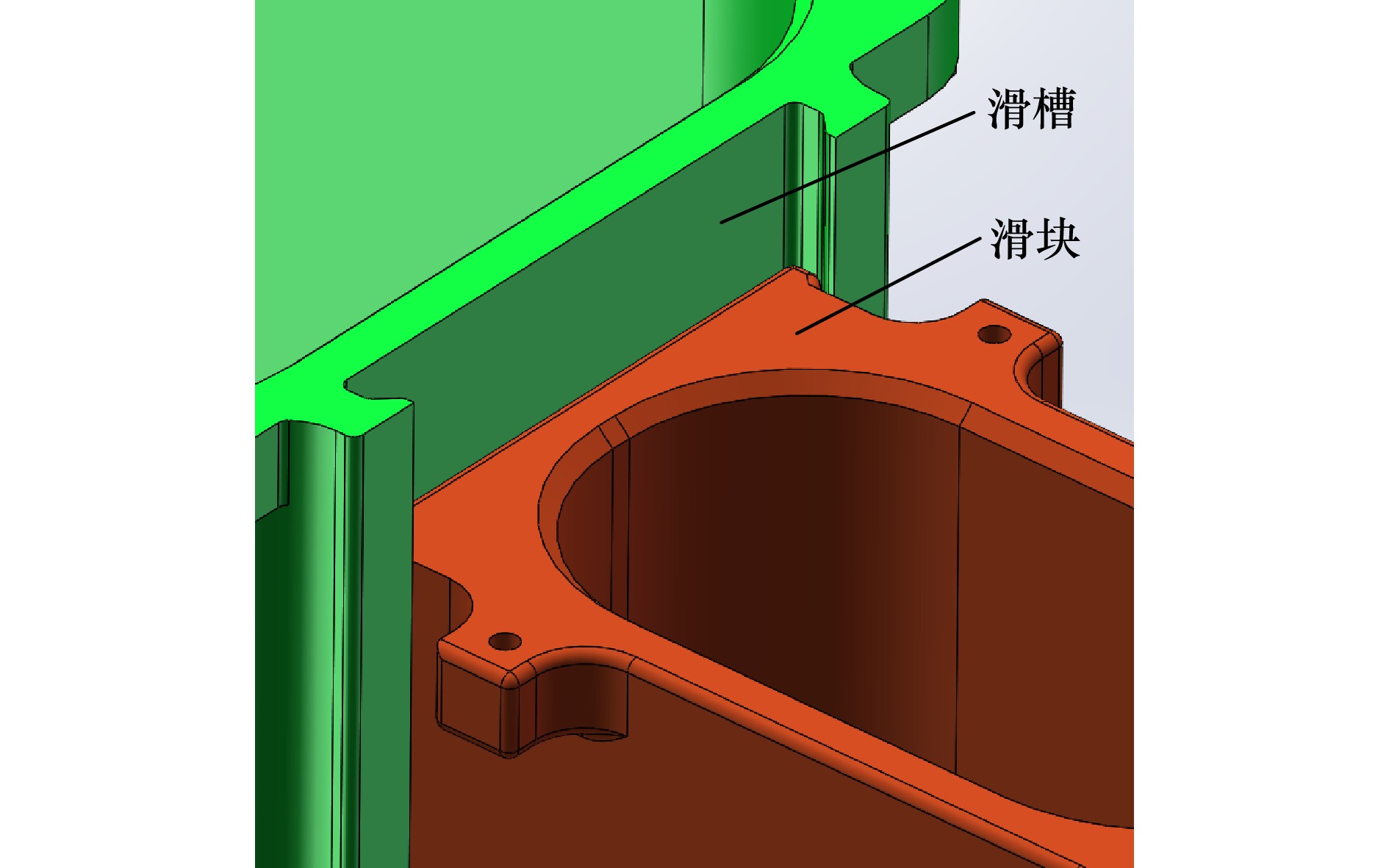
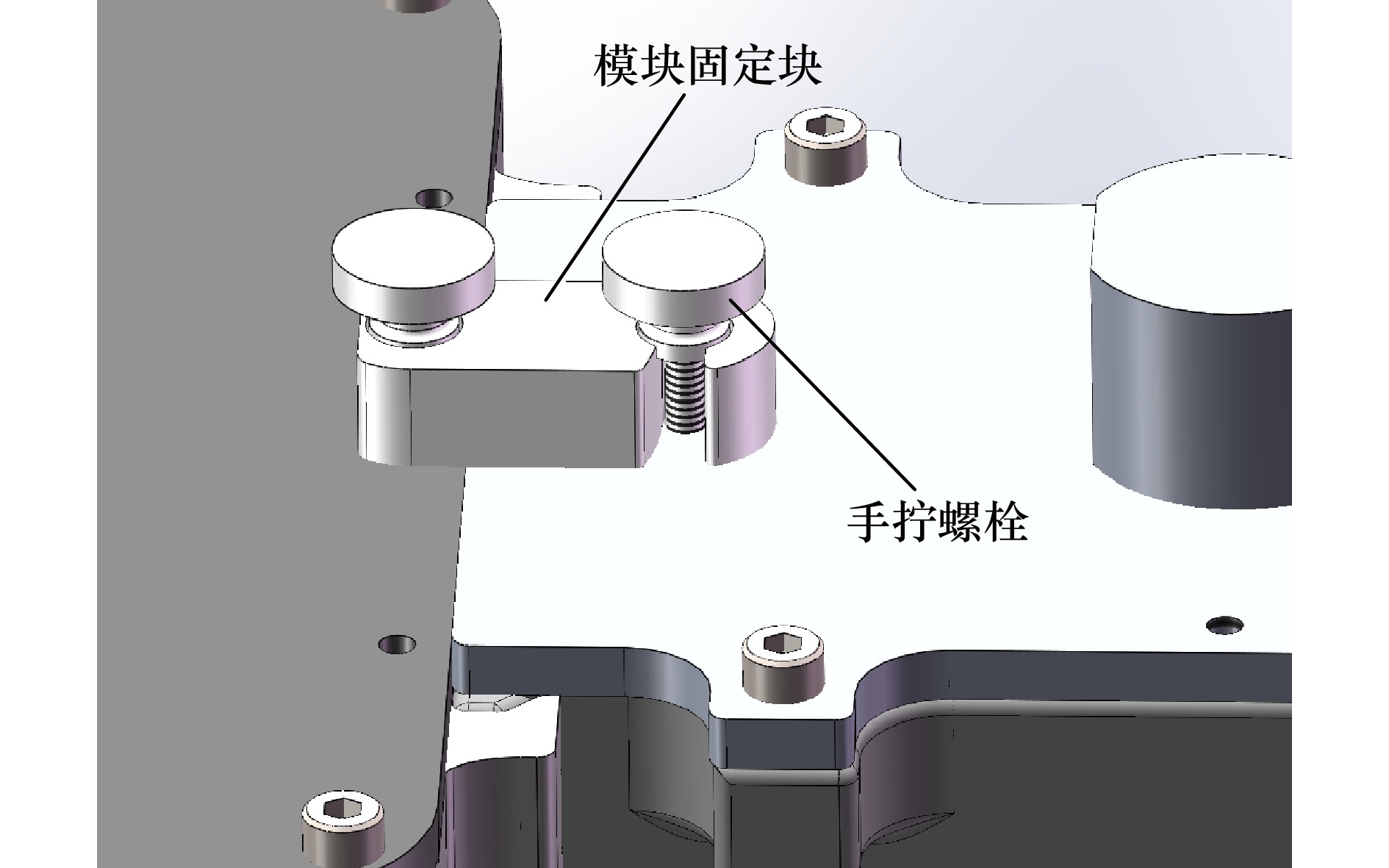
图 5 模块间锁定机构解锁和锁定状态示意图
Fig. 5 Locked and unlocked states of inter-module locking mechanism
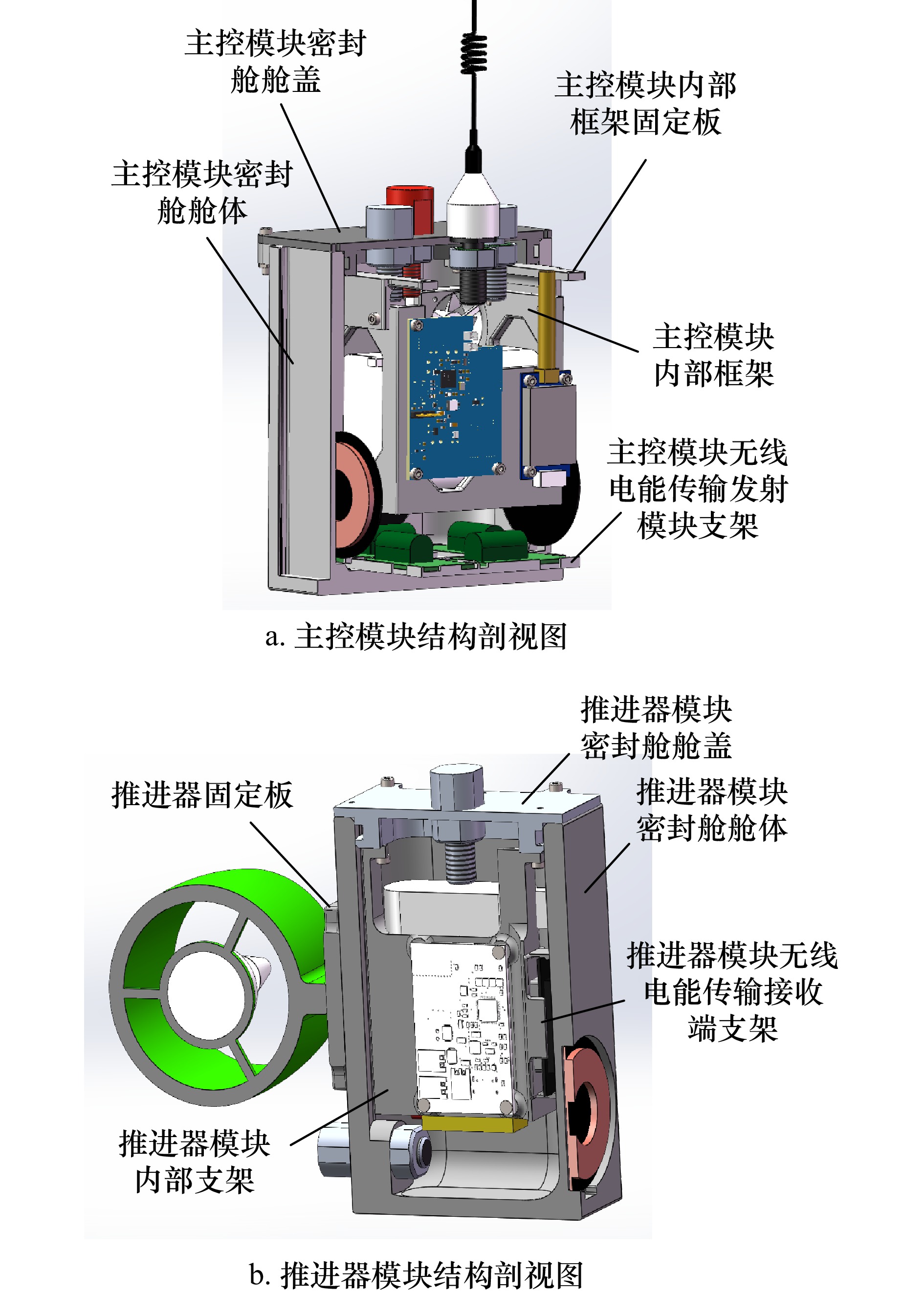
图 7 模块结构剖视图
a. 主控模块结构剖视图;b. 推进器模块结构剖视图
Fig. 7 Cross-sectional view of module structure
a. Cross-sectional view of main control module; b. Cross-sectional view of thruster module
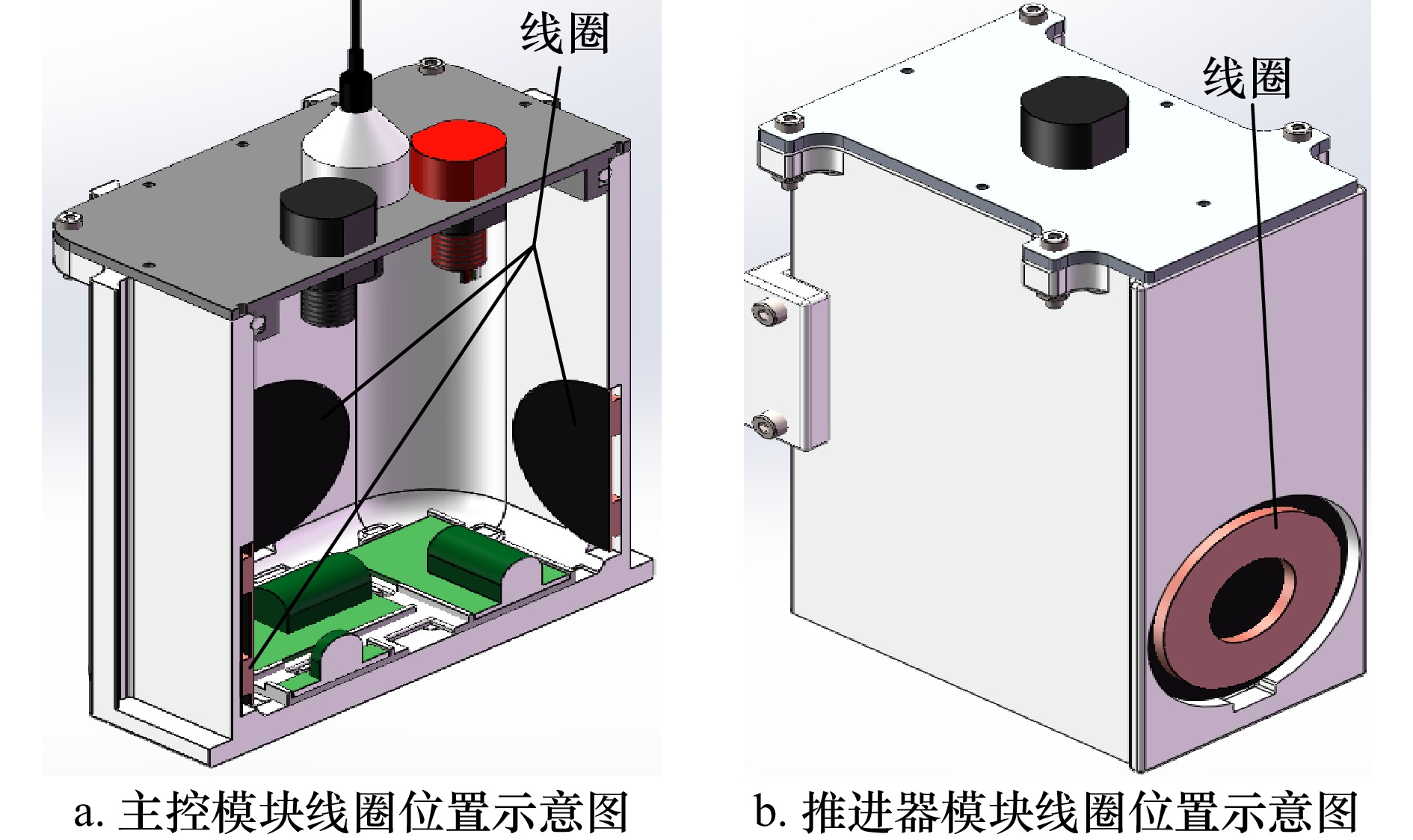
图 8 线圈位置示意图
a. 主控模块线圈位置示意图;b. 推进器模块线圈位置示意图
Fig. 8 Schematic diagram of coil positions
a. Coil positions in the main control module; b. coil positions in the thruster module
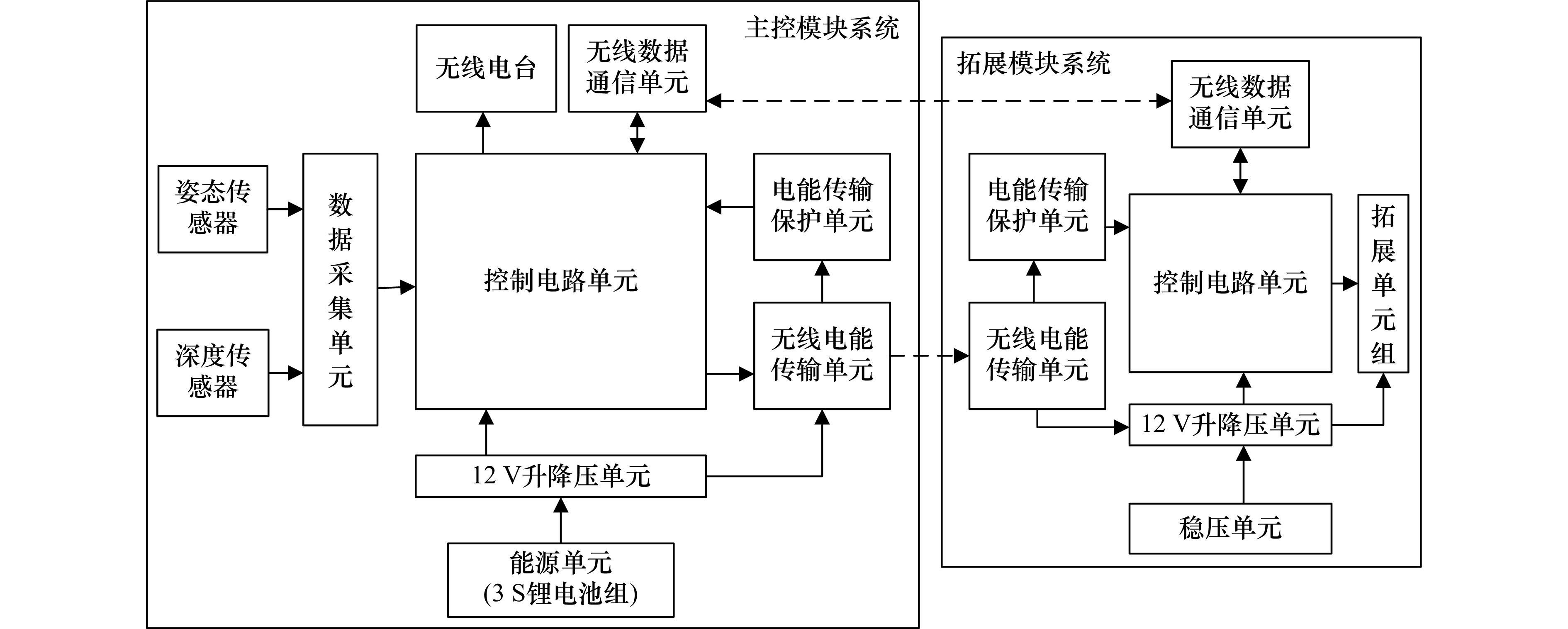
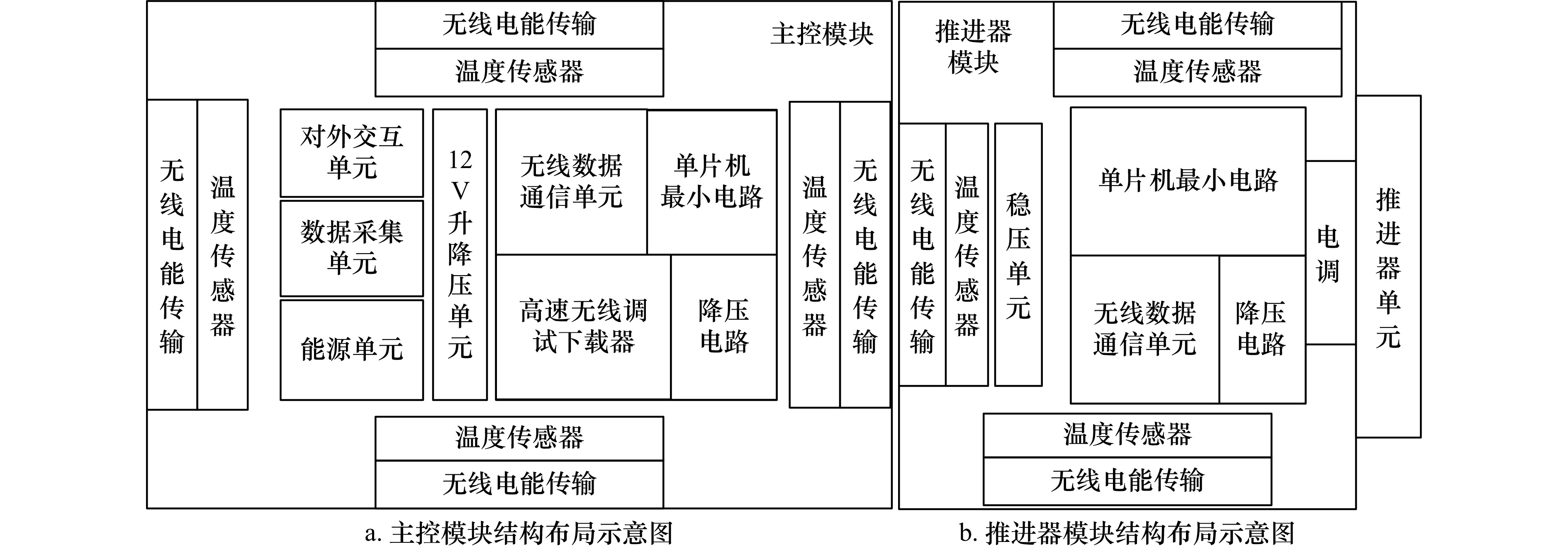
图 9 主控模块和拓展模块电子系统组成及模块间互联工作示意图
Fig. 9 Electronic system composition of main control module and expansion module and their power and signal interconnection
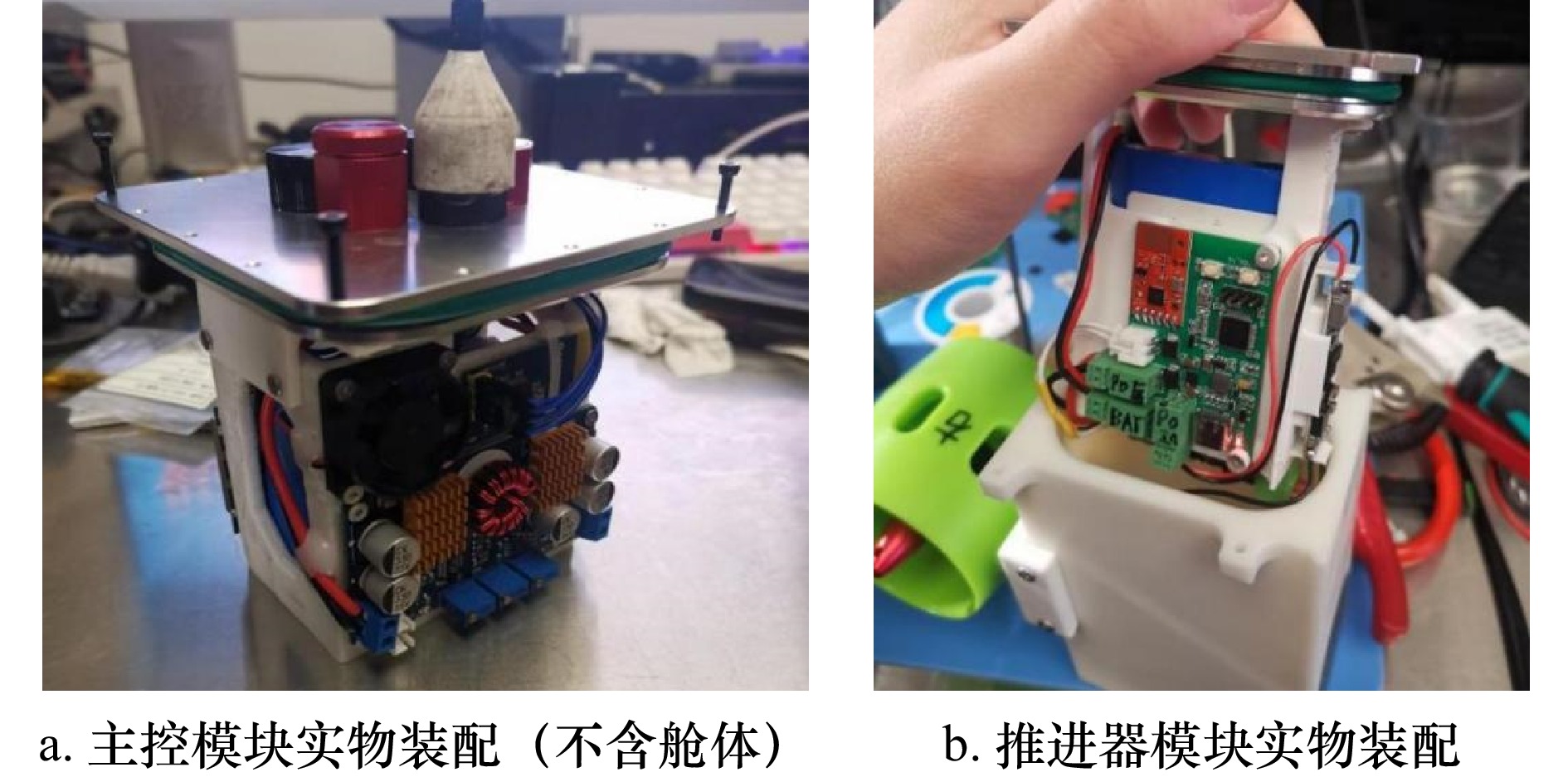
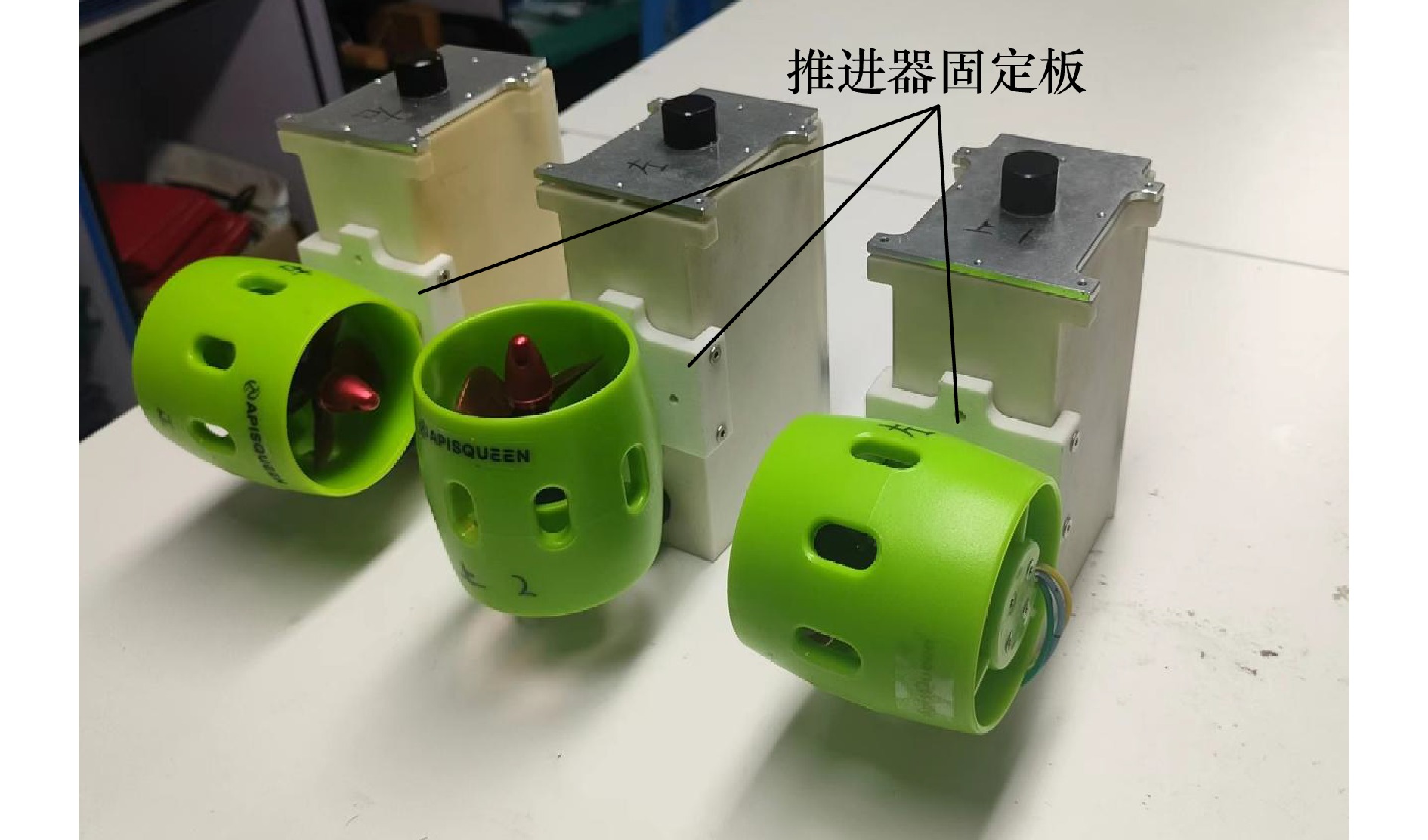
图 12 主控模块和推进器模块实物装配图
Fig. 12 Physical assembly diagram of the main control module and thruster module
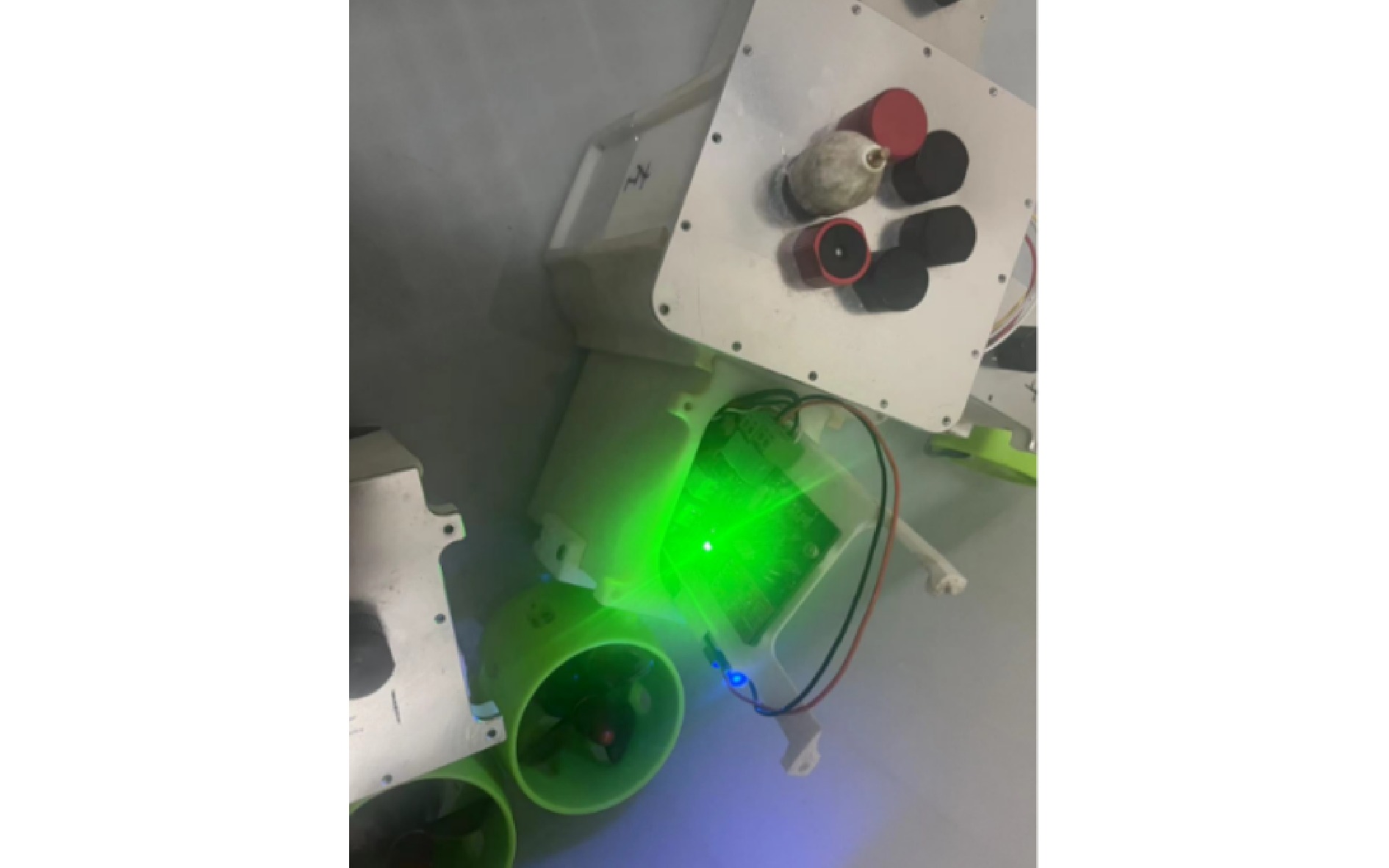
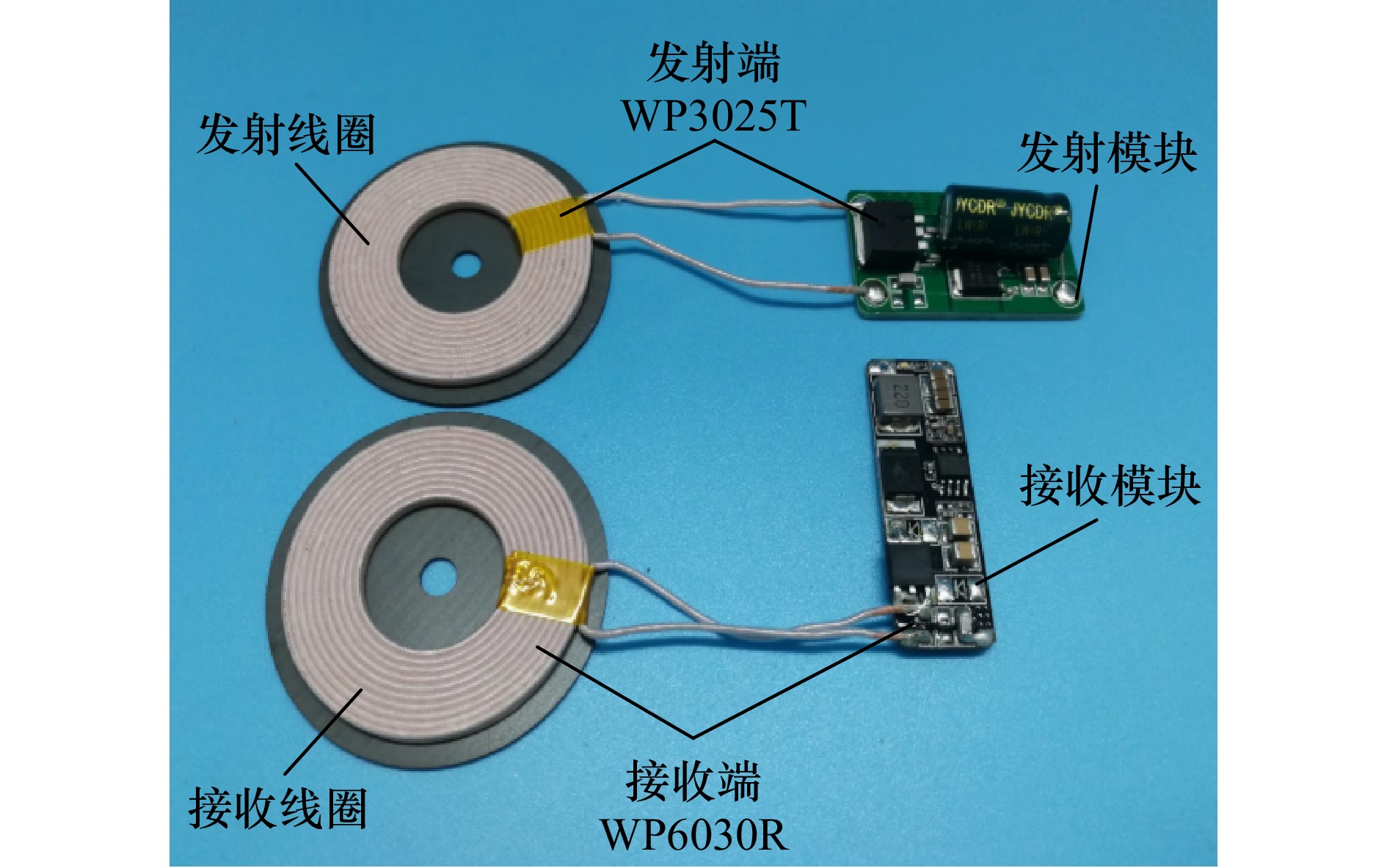
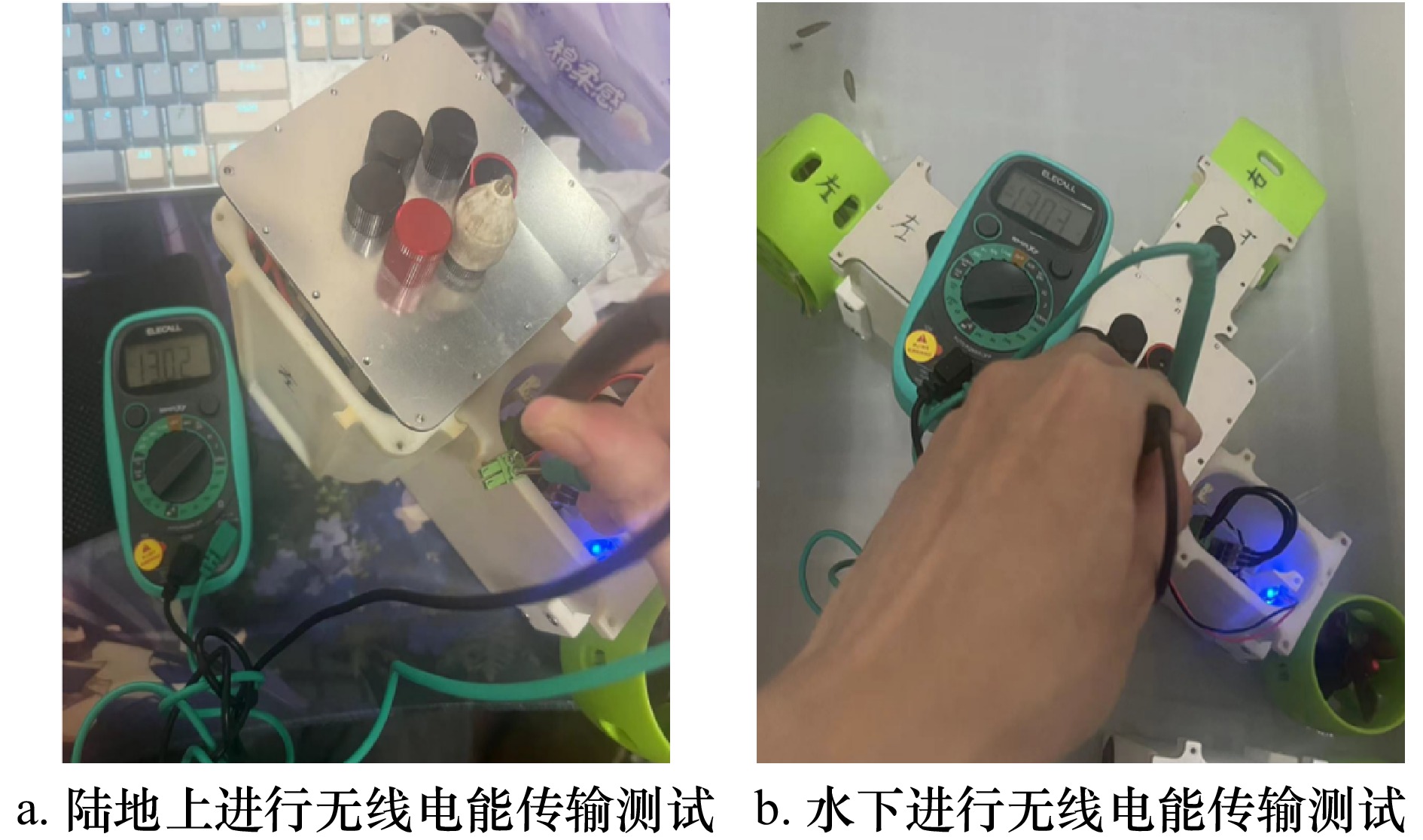
图 17 无线电能传输单元带载工作图
Fig. 17 Operational diagram of wireless power transmission unit under load
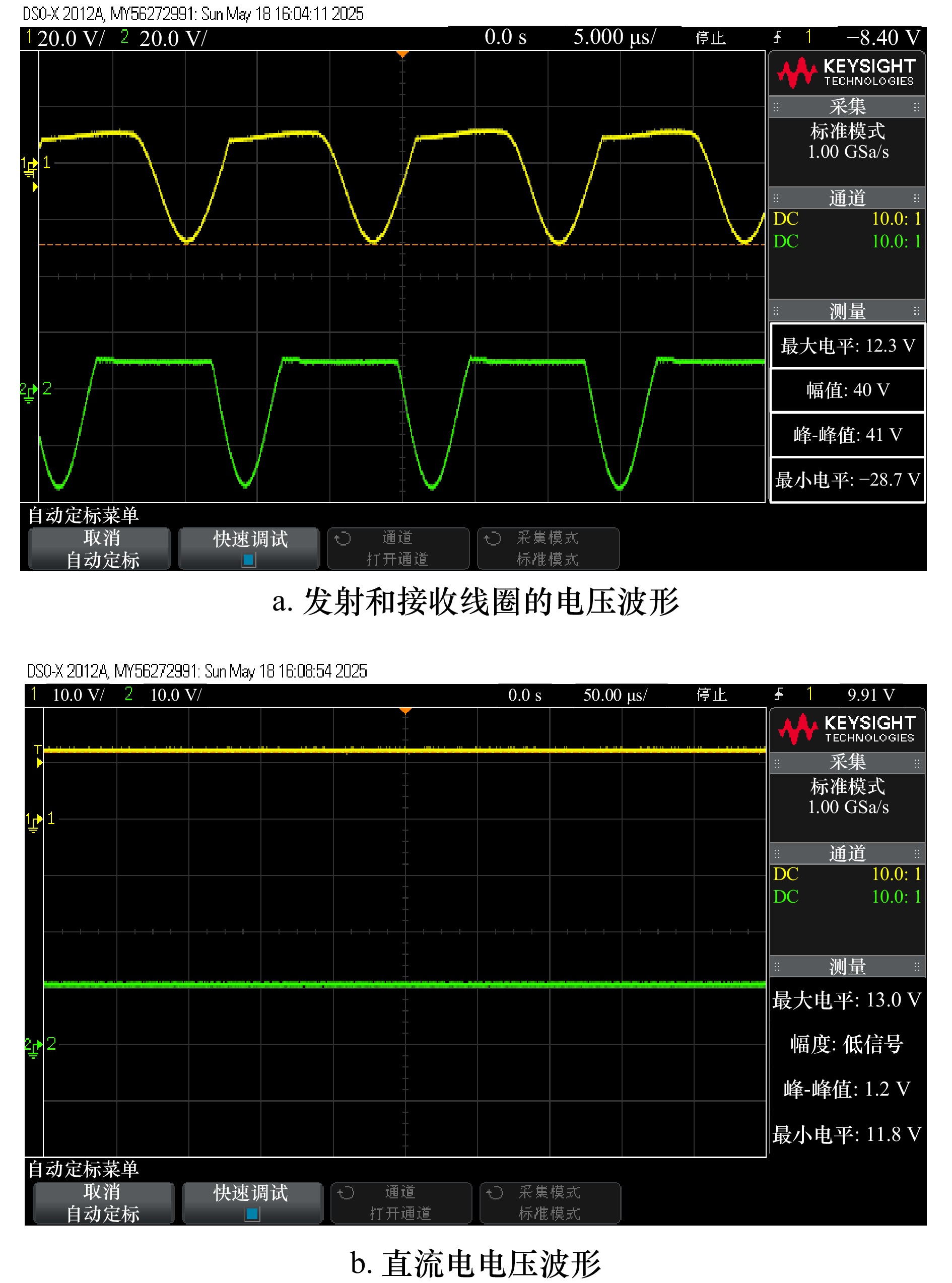
图 18 无线电能传输波形图
a. 黄线为示波器通道1测得的发射线圈电压波形,绿线为通道2测得的接收线圈电压波形;b. 黄线为示波器通道1测得的发射端输入波形,绿线为示波器通道2测得的接收端输出波形
Fig. 18 Waveform diagram of wireless power transmission
a. The yellow line indicates voltage waveform of transmitter coil via oscilloscope channel 1 and the green line indicates receiver coil via channel 2; b. the yellow line indicates voltage wave form of transmitter input via oscilloscope channel 1 and the green line indicates receiver output via channel 2
表 1 模块和样机的体积、质量及因模块化设计额外增加的占比
Tab. 1 Volume, mass, and increased proportion due to modular design in modules and the prototype
推进器模块 主控模块 本文四推进器样机 尺寸(长×宽×高)/mm 97.8×68×145 118×118×166 452.6×452.6×151.5 体积/cm3 407.45 803.15 2874.51 质量/g 790 1271 4875 模块化设计产生的
额外体积/cm345.96 61.28 154.1 模块化设计产生的
额外体积占比11.28% 7.63% 10.08% 模块化设计产生的
额外质量/g209.57 279.46 1117.74 模块化设计产生的
额外质量占比26.53% 21.99% 22.93%  下载: 导出CSV
下载: 导出CSV
表 2 带载状态无线电能传输测试数据
Tab. 2 Wireless power transmission test data under load
电压/V 电流/A 功率/W 发射端的输入 11.11 1.25 13.88 接收端的输出 10.97 1.19 13.05
下载: 导出CSV
-
[1] 李硕, 吴园涛, 李琛, 等. 水下机器人应用及展望[J]. 中国科学院院刊, 2022, 37(7): 910−920.Li Shuo, Wu Yuantao, Li Chen, et al. Application and prospect of unmanned underwater vehicle[J]. Bulletin of Chinese Academy of Sciences, 2022, 37(7): 910−920. [2] 吴凯强. 遥控无人潜水器在海洋水下作业中的应用[J]. 科学与财富, 2024(4): 202−204.Wu Kaiqiang. Application of remotely operated underwater vehicles in marine subsea operations[J]. Sciences & Wealth, 2024(4): 202−204. [3] 武建国, 任志刚, 吕日恒. 模块化自主水下机器人开发与应用[J]. 海洋信息技术与应用, 2022, 37(1): 10−20. doi: 10.3969/j.issn.1005-1724.2022.01.002Wu Jianguo, Ren Zhigang, Lü Riheng. Development and application of modular autonomous underwater vehicle[J]. Journal of Marine Information Technology and Application, 2022, 37(1): 10−20. doi: 10.3969/j.issn.1005-1724.2022.01.002 [4] 李治洋, 郭威, 葛新. 模块化水下机器人控制系统设计[J]. 机械设计与制造, 2012(1): 36−38. doi: 10.3969/j.issn.1001-3997.2012.01.014Li Zhiyang, Guo Wei, Ge Xin. Control system design for ROV based on modularization[J]. Machinery Design & Manufacture, 2012(1): 36−38. doi: 10.3969/j.issn.1001-3997.2012.01.014 [5] Hiller T, Steingrimsson A, Melvin R. Expanding the small AUV mission envelope; longer, deeper & more accurate[C]//2012 IEEE/OES autonomous underwater vehicles (AUV). Southampton: IEEE, 2012: 1−4. [6] Cruz N A, Matos A C. The MARES AUV, a modular autonomous robot for environment sampling[C]//OCEANS 2008. Quebec City: IEEE, 2008: 1−6. [7] Cruz N A, Matos A C, Ferreira B M. Modular building blocks for the development of AUVs—from MARES to TriMARES[C]//2013 IEEE International Underwater Technology Symposium (UT). Tokyo: IEEE, 2013: 1−8. [8] Tolstonogov A Y, Chemezov I A, Kolomeitsev A Y, et al. The modular approach for underwater vehicle design[C]//Global Oceans 2020: Singapore–U. S. Gulf Coast. Biloxi: IEEE, 2020: 1−7. [9] Tolstonogov A Y, Fries D, Storozhenko V A, et al. The Dagon system: a modular AUV for long-term monitoring and observation[C]//OCEANS 2021: San Diego-Porto. San Diego: IEEE, 2021: 1−9. [10] 孟令帅, 林扬, 郑荣, 等. 模块化自主水下机器人的机械设计与实现[J]. 机器人, 2016, 38(4): 395−401.Meng Lingshuai, Lin Yang, Zheng Rong, et al. Mechanical design and implementation of a modular autonomous underwater vehicle[J]. Robot, 2016, 38(4): 395−401. [11] 武建国, 陈凯, 忻加成, 等. 系列模块化自主水下机器人的研发及推广应用[J]. 中国科技成果, 2019, 20(19): 54−55, 70.Wu Jianguo, Chen Kai, Xin Jiacheng, et al. Development and application of a series of modular autonomous underwater vehicles[J]. China Science and Technology Achievements, 2019, 20(19): 54−55, 70. [12] Zhou Jing, Hu Sideng, Li Tiefeng, et al. Cubic marine robotics[J]. Nature Reviews Electrical Engineering, 2024, 1(3): 143−144. doi: 10.1038/s44287-024-00030-z [13] Wen Qingbin, Feng Rendong, An Xinyu, et al. Optimal design of an autonomous underwater helicopter’s shape based on combinatorial optimization strategy[J]. Ocean Engineering, 2022, 266: 113015. doi: 10.1016/j.oceaneng.2022.113015 [14] Hu Sijie, Feng Rendong, Wang Zhanglin, et al. Control system of the autonomous underwater helicopter for pipeline inspection[J]. Ocean Engineering, 2022, 266: 113190. doi: 10.1016/j.oceaneng.2022.113190 -


计量
- 文章访问数: 581
- HTML全文浏览量: 390
- PDF下载量: 66
- 被引次数: 0
