

Basic geoacoustic structure and geoacoustic model for seafloor sediments
-
摘要: 为准确建立海底地声模型,本文探讨地声模型的基本组成和基本结构。通过样品实验室测量,分析南海海底表层沉积物的密度、孔隙度与声速随着埋深变化的关系,得出海底实际存在的低声速表面–声速缓慢变化类型、低声速表面–声速增大类型、高声速表面–声速缓慢变化类型和高声速表面–声速增大类型4种典型地声结构;对比钻探测量,分析黄海海底沉积物的密度、孔隙度与声速随埋深变化关系,得出海底地声模型分层特征与地声结构组合特征。研究表明,地声模型可以归结为4种基本地声结构的组合,通过与底层海水声速、同层内声速剖面以及与上层海底沉积物下表面声速的比较,可以建立各种海底地声模型;基于实验室测量法建立的地声模型可以作为参考地声模型,但需要考虑实际海底温度和压力梯度以及海底沉积物的频散特性等,借助于声速比校正法和频散性理论模型进行计算及修正。Abstract: To accurately establish a geoacoustic model for seafloor sediments, the elemental composition and structure of the geoacoustic model are explored in this paper. Based on the laboratory measurements of seafloor sediment samples, the buried depth relationship between density, porosity, and sound velocity of seafloor surface sediments in the South China Sea is analyzed. Four typical seafloor geoacoustic structures are obtained: low sound velocity surface-sound velocity slow change type, low sound velocity surface-sound velocity increase type, high sound velocity surface-sound velocity slow change type, and high sound velocity surface-sound velocity increase type. By comparing the drilling survey and analyzing the buried depth relationship between density, porosity, and sound velocity of seafloor sediments in the Yellow Sea, the actual layered characteristics and the combination characteristics of the geoacoustic structure are obtained. It shows that the geoacoustic model can be attributed to a combination of four basic geoacoustic structures. Various actual seafloor geoacoustic models can be derived from the comparisons between the acoustic sound speed of the bottom seawater, the sound velocity profile of seafloor sediments in the same layer, and the bottom sound velocity of the upper sediment. The geoacoustic model based on the laboratory measurement analysis of seafloor sediment samples can be used as a reference geoacoustic model. However, it should be modified with the sound velocity ratio correction method and theoretical calculation method of dispersion characteristics with the consideration of the actual seafloor temperature gradient, pressure gradient, and dispersion characteristics of seafloor sediment.
-
Key words:
- geoacoustic model /
- geoacoustic structure /
- seafloor sediments /
- sound velocity /
- frequency dispersion
-

图 2 海底沉积物样品NHB21的声速–孔隙度沿埋深分布
Fig. 2 Distribution of sound velocity and porosity along buried depth of seafloor sediment sample NHB21
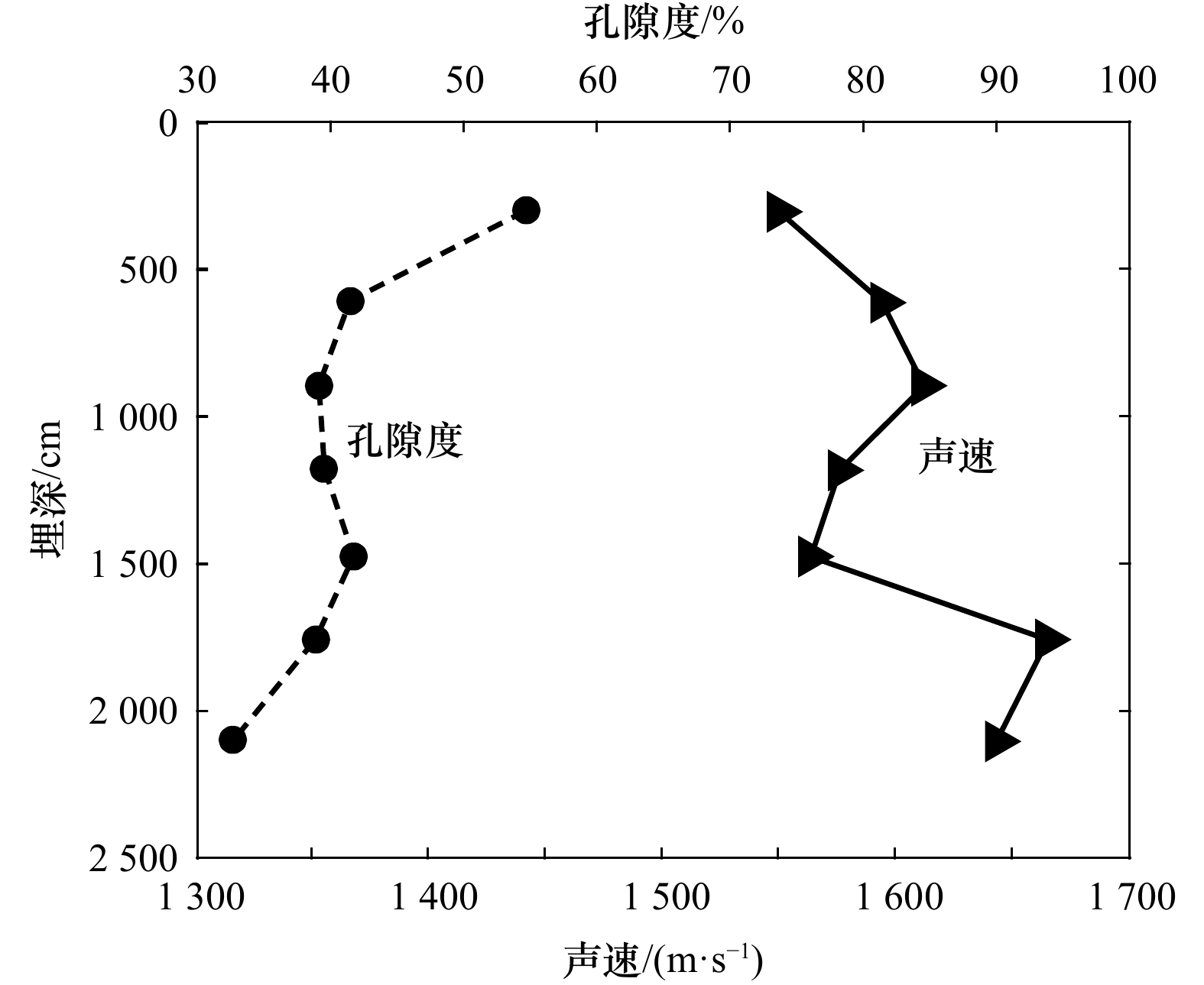
图 3 海底沉积物样品NH06的声速–孔隙度沿埋深分布
Fig. 3 Distribution of sound velocity and porosity along buried depth of seafloor sediment sample NH06
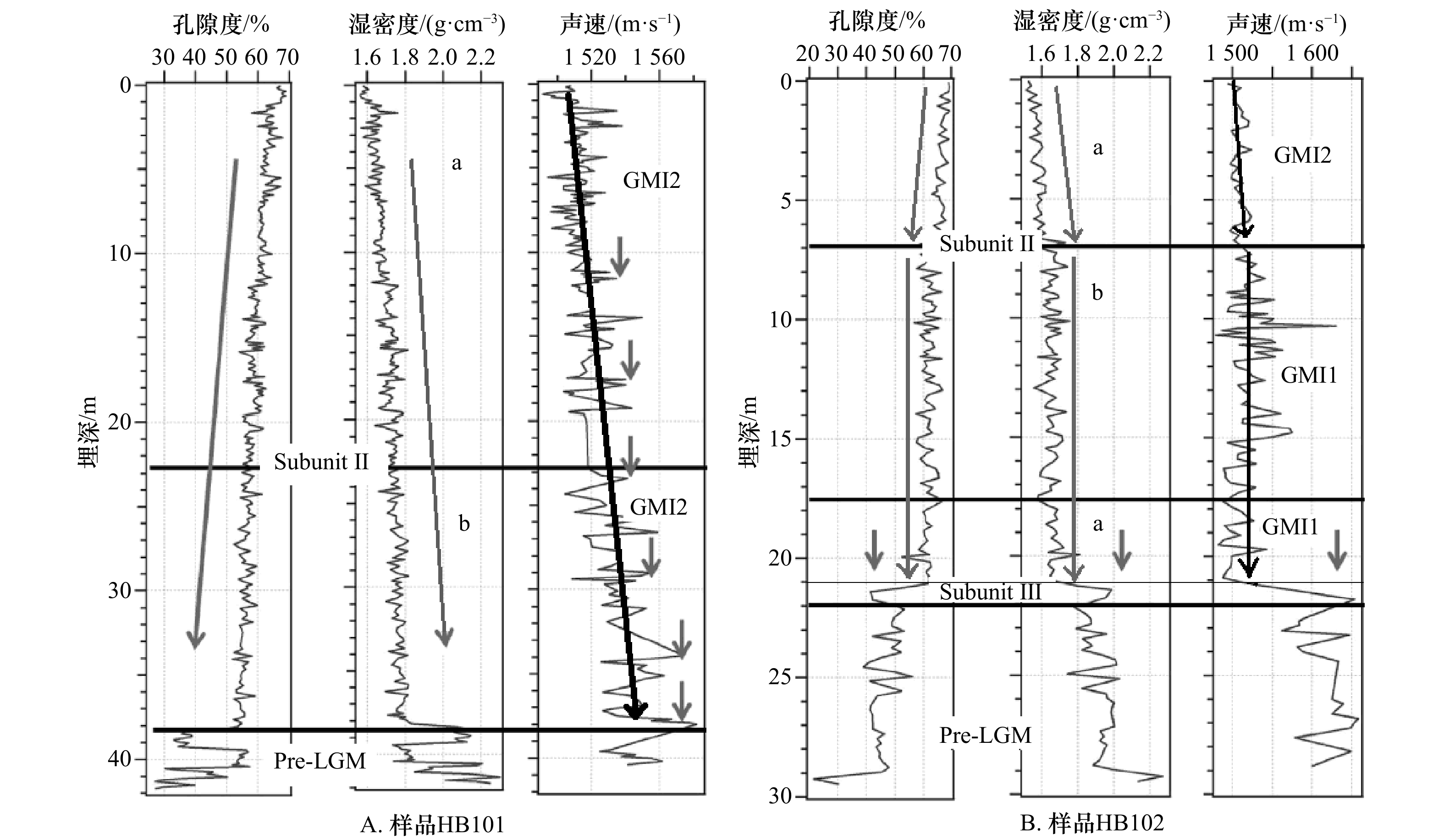

图 5 基于EDFM模型计算海底沉积物频散特性
Fig. 5 Calculated dispersion characteristics of seafloor sediments based on EDFM
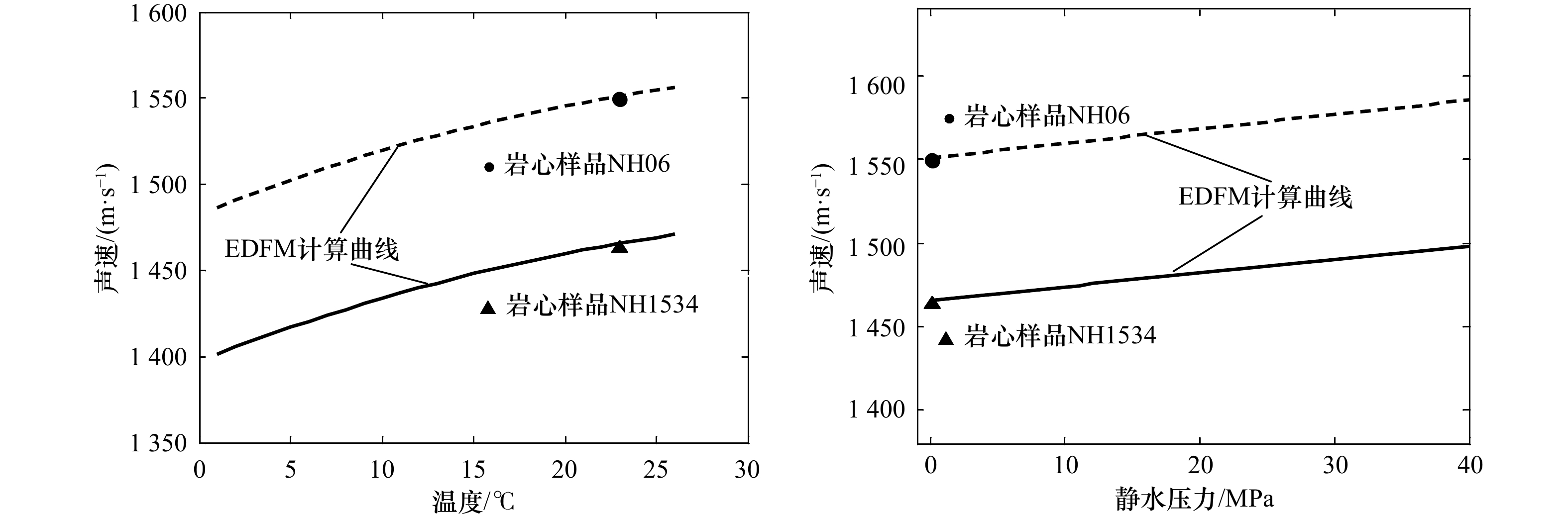
图 6 温度和静水压力对海底沉积物声速的影响特性
Fig. 6 Influence characteristics of temperature and hydrostatic pressure on sound velocity of seafloor sediments
表 1 地声模型建立方法的比较
Tab. 1 Comparison of establishment methods of geoacoustic model
建立方法 测量频率/kHz 海底埋深深度 地声参数 物理特性 遥测法 0.01~151) 通常几十米,可以至数千米 压缩波波速及其衰减系数 基于经验方程或者理论模型反演
计算获得实验室测量法 30~1 000 通常为0.5~4 m,部分
能够达到8 m压缩波波速及其衰减系数为主,部分
获得剪切波的波速及其衰减系数基于实验室测量可以获得全部所
需物理力学特性海底原位测量法 1~260 通常为0.3~3 m,部分
能够达到6~8 m压缩波波速及其衰减系数为主,部分
获得剪切波的波速及其衰减系数需要通过同站位采集样品实验室
测量获得钻探测量法 约402) 通常几十米,可以至数千米 压缩波波速和剪切波波速为主,可以
获得衰减系数随钻直接测量或者采集样品实验
室测量获得注:1)遥测法中的浅地层剖面仪、多波束测量、侧扫声呐等高频探测频率段未计入内;2)钻探取样样品的测量频率段未计入内,可参照样品采集的实验室测量法。  下载: 导出CSV
下载: 导出CSV
-
[1] 李梦竹, 李整林, 李倩倩. 南海北部负跃层环境下海底参数声学反演[J]. 声学学报, 2019, 44(3): 321−328.Li Mengzhu, Li Zhenglin, Li Qianqian. Geoacoustic inversion for bottom parameters in a thermocline environment in the northern area of the South China Sea[J]. Acta Acustica, 2019, 44(3): 321−328. [2] Belcourt J, Holland C W, Dosso S E, et al. Depth-dependent geoacoustic inferences with dispersion at the New England mud patch via reflection coefficient inversion[J]. IEEE Journal of Oceanic Engineering, 2020, 45(1): 69−91. doi: 10.1109/JOE.2019.2900115 [3] 任群言, 朴胜春, 马力, 等. 利用渔船噪声矢量场对地声参数的估计[J]. 哈尔滨工程大学学报, 2018, 39(2): 236−240.Ren Qunyan, Piao Shengchun, Ma Li, et al. Geoacoustic inversion using ship noise vector field[J]. Journal of Harbin Engineering University, 2018, 39(2): 236−240. [4] 杨坤德, 马远良. 利用海底反射信号进行地声参数反演的方法[J]. 物理学报, 2009, 58(3): 1798−1805. doi: 10.3321/j.issn:1000-3290.2009.03.066Yang Kunde, Ma Yuanliang. A geoacoustic inversion method based on bottom reflection signals[J]. Acta Physica Sinica, 2009, 58(3): 1798−1805. doi: 10.3321/j.issn:1000-3290.2009.03.066 [5] Schock S G. A method for estimating the physical and acoustic properties of the sea bed using chirp sonar data[J]. IEEE Journal of Oceanic Engineering, 2004, 29(4): 1200−1217. doi: 10.1109/JOE.2004.841421 [6] 吴金荣, 马力, 郭圣明. 基于地声模型的浅海混响地声反演研究[J]. 哈尔滨工程大学学报, 2010, 51(7): 856−862. doi: 10.3969/j.issn.1006-7043.2010.07.007Wu Jinrong, Ma Li, Guo Shengming. Geoacoustic inversion of reverberation data by applying a geoacoustic model in shallow water[J]. Journal of Harbin Engineering University, 2010, 51(7): 856−862. doi: 10.3969/j.issn.1006-7043.2010.07.007 [7] 李风华, 张仁和. 由脉冲波形与传播损失反演海底声速与衰减系数[J]. 声学学报, 2000, 25(4): 297−302. doi: 10.3321/j.issn:0371-0025.2000.04.002Li Fenghua, Zhang Renhe. Bottom sound speed and attenuation inverted by using pulsed waveform and transmission loss[J]. Acta Acustica, 2000, 25(4): 297−302. doi: 10.3321/j.issn:0371-0025.2000.04.002 [8] 尚尔昌. 水声学中地声反演的新进展[J]. 应用声学, 2019, 38(4): 468−476. doi: 10.11684/j.issn.1000-310X.2019.04.001Shang Erchang. Progress of geoacoustic inversion in underwater acoustics[J]. Journal of Applied Acoustics, 2019, 38(4): 468−476. doi: 10.11684/j.issn.1000-310X.2019.04.001 [9] 周志愚, 杜继川, 赵广存, 等. 南海、黄海海底声速垂直分布的测量结果[J]. 海洋学报, 1983, 5(5): 543−552.Zhou Zhiyu, Du Jichuan, Zhao Guangcun, et al. Measurement results of vertical distribution of sound velocity on the seabed of the South China Sea and the Yellow Sea[J]. Haiyang Xuebao, 1983, 5(5): 543−552. [10] Buckingham M J. Wave speed and attenuation profiles in a stratified marine sediment: Geo-acoustic modeling of seabed layering using the viscous grain shearing theory[J]. The Journal of the Acoustical Society of America, 2020, 148(2): 962−974. doi: 10.1121/10.0001778 [11] Stoll R D, Bautista E O. Using the Biot theory to establish a baseline geoacoustic model for seafloor sediments[J]. Continental Shelf Research, 1998, 18(14/15): 1839−1857. [12] 邹大鹏, 阎贫, 卢博. 基于海底表层沉积物声速特征的南海地声模型[J]. 海洋学报, 2012, 34(3): 80−86.Zou Dapeng, Yan Pin, Lu Bo. A geoacoustic model based on sound speed characteristic of seafloor surface sediments of the South China Sea[J]. Haiyang Xuebao, 2012, 34(3): 80−86. [13] Hamilton E L. Geoacoustic modeling of the sea floor[J]. The Journal of the Acoustical Society of America, 1980, 68(5): 1313−1340. doi: 10.1121/1.385100 [14] Hamilton E L. Variations of density and porosity with depth in deep-sea sediments[J]. Journal of Sedimentary Petrology, 1976, 46(2): 280−300. [15] 卢博. 海水−沉积物声速结构模式[J]. 海洋通报, 1995, 14(2): 42−47.Lu Bo. Model of sound velocity structure in seawater-sediments[J]. Marine Science Bulletin, 1995, 14(2): 42−47. [16] P. Sanko, C. Lair. 中国南海的岩心分析和海底照片[J]. 海洋通报, 1975, 21(3): 1−59.P. Sanko, C. Lair. Core analysis and seafloor photographs of the South China Sea[J]. Marine Science Bulletin, 1975, 21(3): 1−59. [17] Wang Jingqiang, Guo Changsheng, Hou Zhengyu, et al. Distributions and vertical variation patterns of sound speed of surface sediments in South China Sea[J]. Journal of Asian Earth Sciences, 2014, 89: 46−53. doi: 10.1016/j.jseaes.2014.03.026 [18] 唐诚, 郑向阳, 李艳芳, 等. 北部湾南部重力柱状样的MSCL地声学性质测量及分析[J]. 海洋科学, 2019, 43(10): 88−95.Tang Cheng, Zheng Xiangyang, Li Yanfang, et al. Geoacoustic properties measurement and analysis of gravity cores using MSCL in the southern Beibu Gulf[J]. Marine Sciences, 2019, 43(10): 88−95. [19] 钱正明. 台湾东南外海海底沉积物物理、土力学和声学特性研究[D]. 台北: 台湾大学, 1989.Qian Zhengming. Study on physical, soil mechanics and acoustic characteristics of seafloor sediments off the southeast coast of Taiwan[D] Taipei: Taiwan University, 1989. [20] Li Guanbao, Wang Jingqiang, Liu Baohua, et al. In situ acoustic properties of fine-grained sediments on the northern continental slope of the South China Sea[J]. Ocean Engineering, 2020, 218: 108244. doi: 10.1016/j.oceaneng.2020.108244 [21] Kim G Y, Park K J, Lee G S, et al. KISAP: a new in situ seafloor velocity measurement tool[J]. Marine Georesources & Geotechnology, 2018, 36(3): 264−270. [22] Ballard M S, Lee K M, McNeese A R, et al. In situ measurements of compressional wave speed during gravity coring operations in the new England mud patch[J]. IEEE Journal of Oceanic Engineering, 2020, 45(1): 26−38. doi: 10.1109/JOE.2019.2924560 [23] Yang Jie, Jackson D R. Measurement of sound speed in fine-grained sediments during the seabed characterization experiment[J]. IEEE Journal of Oceanic Engineering, 2020, 45(1): 39−50. doi: 10.1109/JOE.2019.2946004 [24] 韦海伦, 蔡进功, 王国力, 等. 海洋沉积物有机质赋存的多样性与物源指标的多疑性综述[J]. 地球科学进展, 2018, 33(10): 1024−1033. doi: 10.11867/j.issn.1001-8166.2018.10.1024.Wei Hailun, Cai Jingong, Wang Guoli, et al. The diversity of organic matter in marine sediments and the suspiciousness of source parameters: a review[J]. Advances in Earth Science, 2018, 33(10): 1024−1033. doi: 10.11867/j.issn.1001-8166.2018.10.1024. [25] 段晓勇, 孔祥淮, 印萍, 等. 全球海洋地球化学调查进展[J]. 海洋地质前沿, 2020, 36(7): 1−10.Duan Xiaoyong, Kong Xianghuai, Yin Ping, et al. A progress review of the marine geochemical survey in the world[J]. Marine Geology Frontiers, 2020, 36(7): 1−10. [26] 赵绍华, 刘志飞. 海洋沉积物陆源碎屑粒度分析预处理方法研究[J]. 地球科学进展, 2017, 32(7): 769-780.Zhao Shaohua, Liu Zhifei. A study of pretreatment methods for terrigenous grain-size analysis of marine sediments[J]Advances in Earth Science, 2017, 32(7): 769−780. [27] 郑广赢, 黄益旺, 华健. 声波在水−含气沉积物界面的反射[J]. 声学学报, 2018, 43(6): 961−967.Zheng Guangying, Huang Yiwang, Hua Jian. Reflection of acoustic waves at a water-gassy sediment interface[J]. Acta Acustica, 2018, 43(6): 961−967. [28] 张正一, 范建柯, 白永良, 等. 中国海−西太平洋地区典型剖面的重−磁−震联合反演研究[J]. 地球物理学报, 2018, 61(7): 2871−2891.Zhang Zhengyi, Fan Jianke, Bai Yongliang, et al. Joint inversion of gravity-magnetic-seismic data of a typical profile in the China Sea-Western Pacific area[J]. Chinese Journal of Geophysics, 2018, 61(7): 2871−2891. [29] Zimmer M A, Bibee L D, Richardson M D. Measurement of the frequency dependence of the sound speed and attenuation of seafloor sands from 1 to 400 kHz[J]. IEEE Journal of Oceanic Engineering, 2010, 35(3): 538−557. doi: 10.1109/JOE.2010.2056230 [30] Yu Shengqi, Liu Baohua, Yu Kaiben, et al. Study on sound-speed dispersion in a sandy sediment at frequency ranges of 0.5−3 kHz and 90−170 kHz[J]. China Ocean Engineering, 2017, 31(1): 103−113. doi: 10.1007/s13344-017-0013-6 [31] Hefner B T, Jackson D R, Williams K L, et al. Mid- to high-frequency acoustic penetration and propagation measurements in a sandy sediment[J]. IEEE Journal of Oceanic Engineering, 2009, 34(4): 372−387. doi: 10.1109/JOE.2009.2028410 [32] 陶春辉, 王东, 金翔龙, 等. 海底沉积物声学特性和原位测试技术[M]. 北京: 海洋出版社, 2006.Tao Chunhui, Wang Dong, Jin Xianglong, et al. Marine Sediments Properties and in Situ Acoustic Measurements[M]. Beijing: China Ocean Press, 2006. [33] 侯正瑜, 郭常升, 王景强, 等. 一种新型海底沉积物声学原位测量系统的研制及应用[J]. 地球物理学报, 2015, 58(6): 1976−1984. doi: 10.6038/cjg20150613Hou Zhengyu, Guo Changsheng, Wang Jingqiang, et al. Development and application of a new type in-situ acoustic measurement system of seafloor sediments[J]. Chinese Journal of Geophysics, 2015, 58(6): 1976−1984. doi: 10.6038/cjg20150613 [34] 王景强, 李官保, 阚光明, 等. 深海海底沉积物声学特性原位测量试验研究[J]. 地球物理学报, 2020, 63(12): 4463−4472. doi: 10.6038/cjg2020N0427Wang Jingqiang, Li Guanbao, Kan Guangming, et al. Experiment study of the in situ acoustic measurement in seafloor sediments from deep sea[J]. Chinese Journal of Geophysics, 2020, 63(12): 4463−4472. doi: 10.6038/cjg2020N0427 [35] 汪鹏, 钟广法. 南海ODP1144站深海沉积牵引体的岩石物理模型研究[J]. 地球科学进展, 2012, 27(3): 359−366.Wang Peng, Zhong Guangfa. Applications of rock physics models to the deep-sea sediment drift at ODP site 1144, northern South China Sea[J]. Advances in Earth Science, 2012, 27(3): 359−366. [36] 王华, 陶果, 王兵, 等. 多极子随钻声波测井波场模拟与采集模式分析[J]. 地球物理学报, 2009, 52(9): 2402−2409. doi: 10.3969/j.issn.0001-5733.2009.09.027Wang Hua, Tao Guo, Wang Bing, et al. Wave field simulation and data acquisition scheme analysis for LWD acoustic tool[J]. Chinese Journal of Geophysics, 2009, 52(9): 2402−2409. doi: 10.3969/j.issn.0001-5733.2009.09.027 [37] Kim G Y, Narantsetseg B, Lee J Y, et al. Physical and geotechnical properties of drill core sediments in the Heuksan Mud Belt off SW Korea[J]. Quaternary International, 2018, 468: 33−48. doi: 10.1016/j.quaint.2017.06.018 [38] Zou Dapeng, Zeng Ziwen, Kan Guangming, et al. Influence of environmental conditions on the sound velocity ratio of seafloor surficial sediment[J]. Journal of Ocean University of China, 2021, 20(3): 573−580. doi: 10.1007/s11802-021-4628-0 [39] Kan Guangming, Zou Dapeng, Liu Baohua, et al. Correction for effects of temperature and pressure on sound speed in shallow seafloor sediments[J]. Marine Georesources & Geotechnology, 2019, 37(10): 1217−1226. [40] 邹大鹏, 吕衡生, 阚光明, 等. 海底表层沉积物声速的环境因素影响特性[J]. 声学学报, 2021, 46(2): 227−236.Zou Dapeng, Lü Hengsheng, Kan Guangming, et al. Environmental factors affecting acoustic velocity of seafloor surface sediments[J]. Acta Acustica, 2021, 46(2): 227−236. [41] Williams K L, Jackson D R, Thorsos E I, et al. Comparison of sound speed and attenuation measured in a sandy sediment to predictions based on the Biot theory of porous media[J]. IEEE Journal of Oceanic Engineering, 2002, 27(3): 413−428. doi: 10.1109/JOE.2002.1040928 [42] Buckingham M J, Richardson M D. On tone-burst measurements of sound speed and attenuation in sandy marine sediments[J]. IEEE Journal of Oceanic Engineering, 2002, 27(3): 429−453. doi: 10.1109/JOE.2002.1040929 [43] Williams K L. An effective density fluid model for acoustic propagation in sediments derived from Biot theory[J]. The Journal of the Acoustical Society of America, 2001, 110(5): 2276−2281. doi: 10.1121/1.1412449 [44] Biot M A. Theory of propagation of elastic waves in a fluid-saturated porous solid. Ⅰ. Low-frequency range[J]. The Journal of the Acoustical Society of America, 1956, 28(2): 168−178. doi: 10.1121/1.1908239 [45] Biot M A. Theory of propagation of elastic waves in a fluid-saturated porous solid. Ⅱ. Higher frequency range[J]. The Journal of the Acoustical Society of America, 1956, 28(2): 179−191. doi: 10.1121/1.1908241 [46] Hamilton E L. Prediction of in-situ acoustic and elastic properties of marine sediments[J]. Geophysics, 1971, 36(2): 266−284. doi: 10.1190/1.1440168 -

计量
- 文章访问数: 774
- HTML全文浏览量: 298
- PDF下载量: 69
- 被引次数: 0
