

Medium and long term statistical prediction of sea surface height anomaly in the South China Sea based on evolutionary operator
-
摘要: 水下移动平台行动时需要1~3个月左右海洋数值预测预报结果,但是当前数值预报技术受对应的气象驱动场预报时效的限制,难以提供10 d以上的数值预报产品。鉴于海水在动力热力上具有较大的惯性,海洋内区有其自身的演化规律,本研究设计了一种基于演化算符的统计预测方法,利用历史卫星遥感资料构建海洋状态变量中长期演化矩阵,并结合惯性预报模型,构建了最终的南海海洋中长期统计预报模型,能够提供1~60 d逐日的南海海面高度异常预测结果,开展数值试验验证了该方法的有效性,结果表明,在起报后15 d内,预报结果与卫星资料的相关系数均大于0.8,在起报60 d内,相关系数仍高于0.6。Abstract: When performing work, underwater platforms usually need about 1-month to 3-months ocean numerical forecasts results. However, the current numerical forecasting technology is limited to the corresponding weather-driven field forecasting, and it is difficult to provide numerical forecast products for more than 10 days. Considering that the seawater itself has large inertia physically, and the inner ocean area has its own evolutionary principles, a statistical prediction method based on evolutionary operator is proposed. The method uses historical satellite remote sensing data to construct a long-term evolution matrix of ocean state variables, and then combines with the inertial prediction model. The final medium- and long-term statistical prediction model of the South China Sea is constructed, which can provide the prediction results for 1 d to 60 d of daily sea surface height anomaly in the South China Sea. We carry out the numerical experiments to show the effectiveness of the method. The results show that the correlation coefficients between the forecast results and the satellite data are all higher than 0.8 within 15 days and higher than 0.6 within 60 days after the start date of forecast.
-
Key words:
- ocean forecast /
- evolution operator /
- medium- and long-range
-

图 1 3种预报方法与真实值的相关系数
Fig. 1 Correlation coefficients between three forecasting methods and real values

图 2 3种预报方法与真实值的均方根误差
Fig. 2 Root mean square error between three forecasting methods and real values
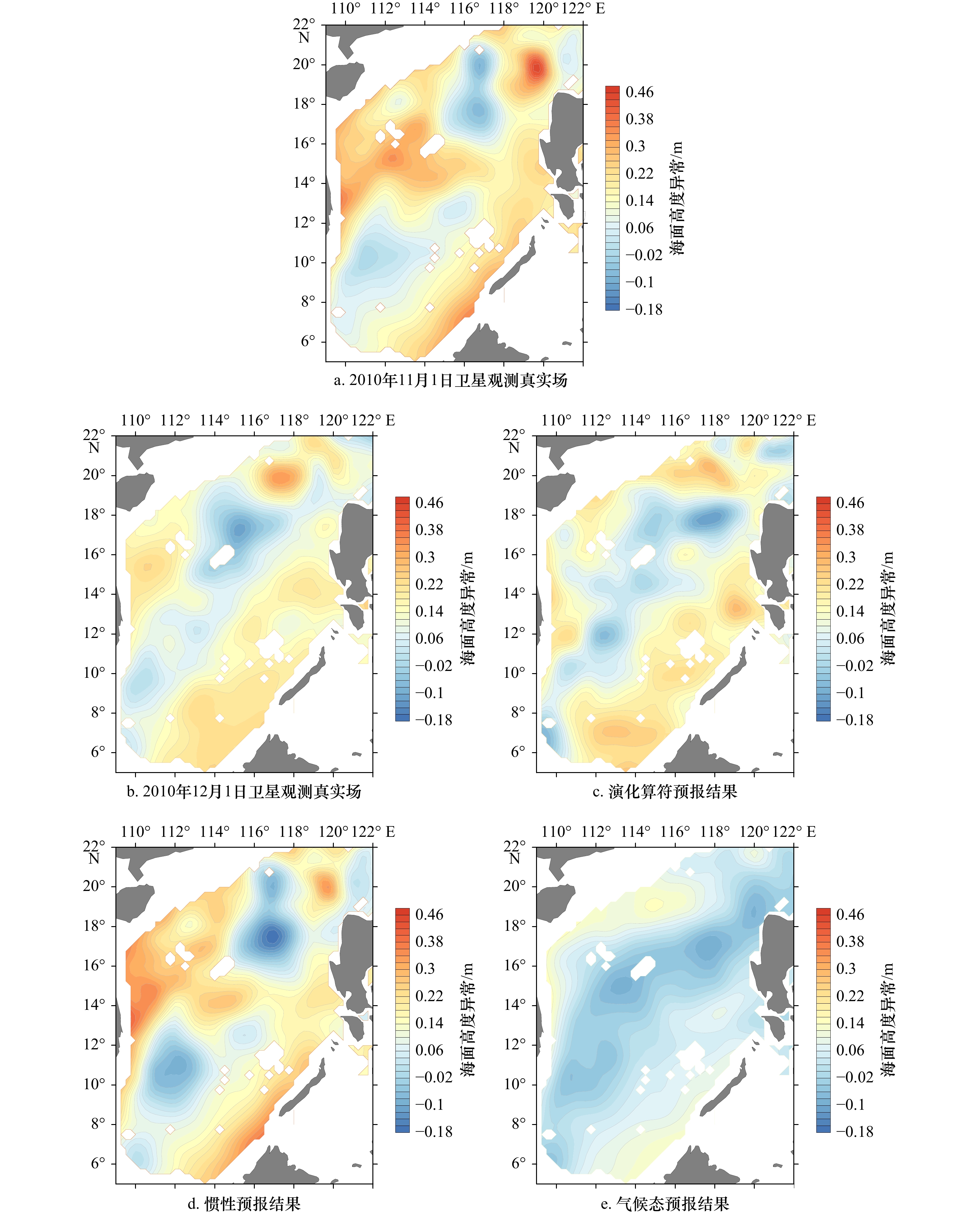
图 3 海面高度异常统计预报结果与卫星观测结果
Fig. 3 Statistical prediction results and satellite observation results of sea surface height anomalies
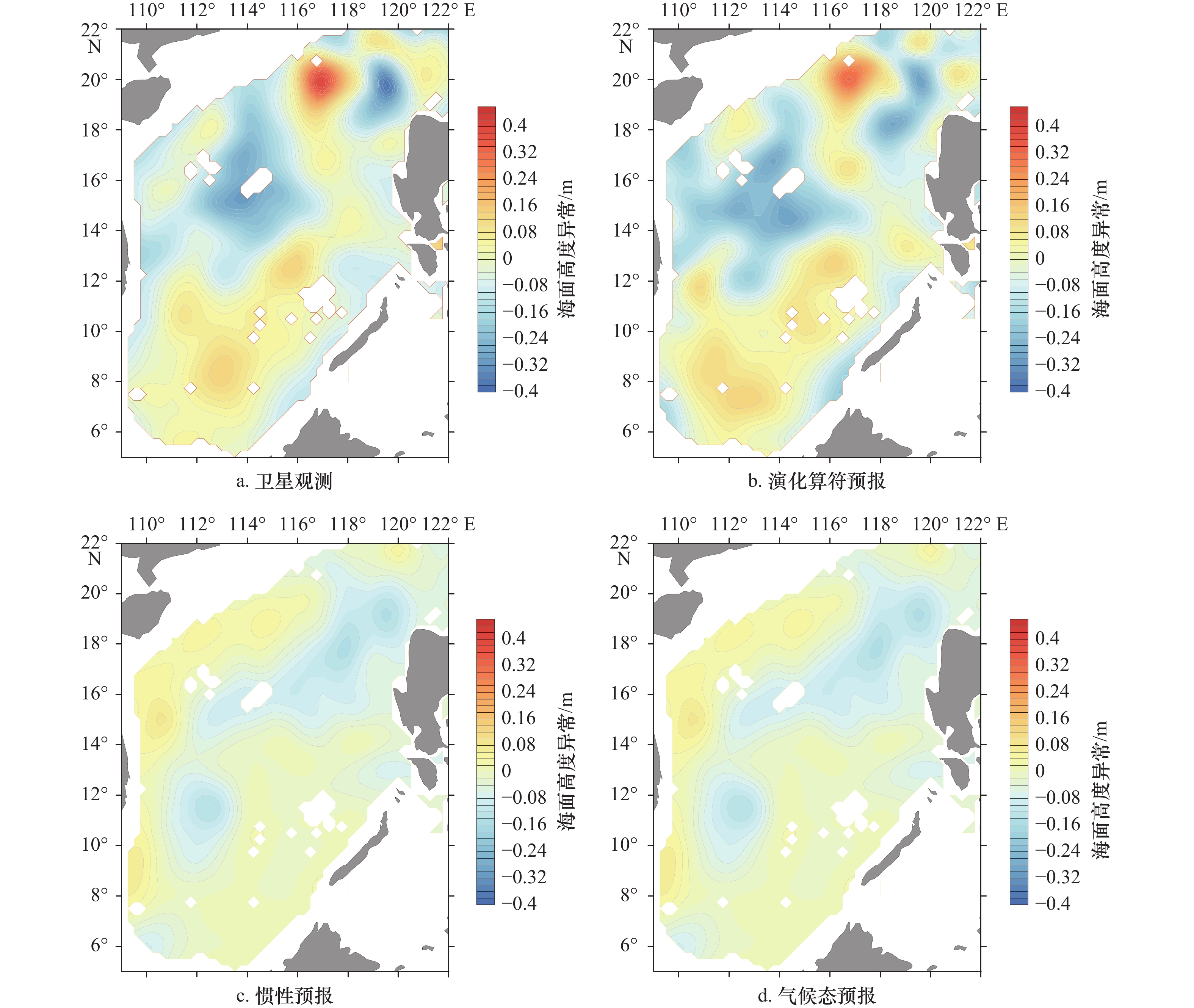
图 4 海面高度异常预测结果与卫星观测结果相对于预测起始点的增量
Fig. 4 The increment of prediction results and satellite observation results relative to the predicted starting point of sea surface height anomaly
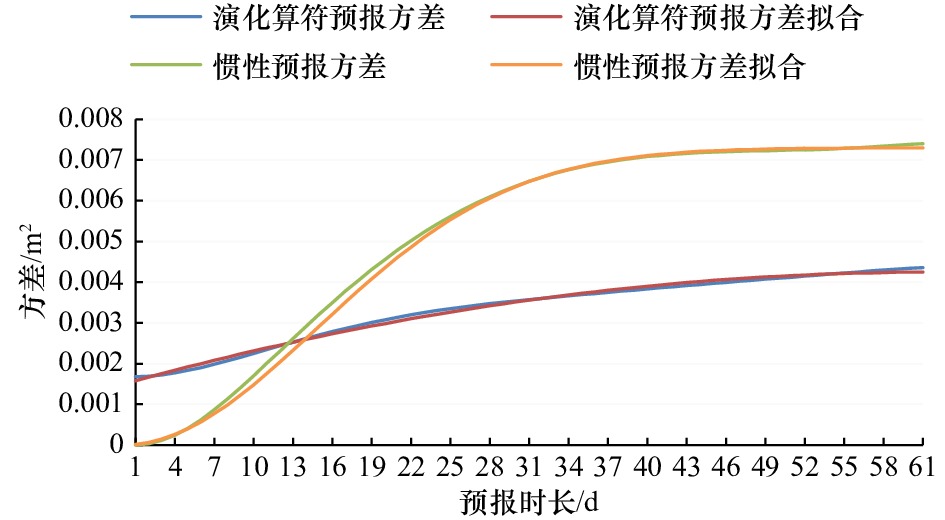
图 5 演化算符预报与惯性预报方差的曲线拟合
Fig. 5 Curve fitting of evolutionary operator prediction and inertial prediction error

图 6 综合模型与3种模型的均方根误差与相关系数对比
a. 4种预报方法与真实值的均方根误差;b. 4种预报方法与真实值的相关系数
Fig. 6 Comparison of root mean square error and correlation coefficients between the comprehensive model and the three models
a. Four forecasting methods with real values root mean square error; b. correlation coefficients between four forecasting methods and real values
-
[1] 乔方利. 海洋动力环境要素数值预报关键技术[J]. 海洋开发与管理, 2006, 23(5): 59−60. doi: 10.3969/j.issn.1005-9857.2006.05.017Qiao Fangli. Key technology of NWP: Dynamic elements of marine environment[J]. Ocean Development and Management, 2006, 23(5): 59−60. doi: 10.3969/j.issn.1005-9857.2006.05.017 [2] 徐洋, 齐久成, 李清, 等. 美国海军业务化海洋预报系统综述[J]. 舰船科学技术, 2016, 38(5): 142−146. doi: 10.3404/j.issn.1672-7619.2016.05.030Xu Yang, Qi Jiucheng, Li Qing, et al. Overview of US navy operational ocean prediction system[J]. Ship Science and Technology, 2016, 38(5): 142−146. doi: 10.3404/j.issn.1672-7619.2016.05.030 [3] Carman J C, Eleuterio D P, Gallaudet T C, et al. The national earth system prediction capability: Coordinating the giant[J]. Bulletin of the American Meteorological Society, 2016, 98(2): 239−252. [4] 杨德全, 郝日栩, 何健新, 等. 统计预报方法在海洋预报中的应用研究进展[J]. 海洋信息, 2019, 34(2): 1−9.Yang Dequan, Hao Rixu, He Jianxin, et al. Research progress of statistical forecasting methods in ocean prediction[J]. Marine Information, 2019, 34(2): 1−9. [5] Barnston A G, Smith T M. Specification and prediction of global surface temperature and precipitation from global SST using CCA[J]. Journal of Climate, 1996, 9(11): 2660−2697. doi: 10.1175/1520-0442(1996)009<2660:SAPOGS>2.0.CO;2 [6] Landman W A, Mason S J. Forecasts of near-global sea surface temperatures using canonical correlation analysis[J]. Journal of Climate, 2001, 14(18): 3819−3833. doi: 10.1175/1520-0442(2001)014<3819:FONGSS>2.0.CO;2 [7] Niedzielski T, Kosek W. Multivariate stochastic prediction of the global mean sea level anomalies based on TOPEX/Poseidon satellite altimetry[J]. Artificial Satellites, 2005, 40(3): 185−198. [8] Ubilava D, Helmers C G. Forecasting ENSO with a smooth transition autoregressive model[J]. Environmental Modelling & Software, 2013, 40: 181−190. [9] Garcia-Gorriz E, Garcia-Sanchez J. Prediction of sea surface temperatures in the western Mediterranean Sea by neural networks using satellite observations[J]. Geophysical Research Letters, 2007, 34(11): L11603. doi: 10.1029/2007GL029888 [10] 孙文, 王庆宾, 周睿, 等. 海平面异常序列预报方法的比较与分析[J]. 测绘通报, 2014(1): 46−49.Sun Wen, Wang Qingbin, Zhou Rui, et al. A comparison and analysis of methods of sea level anomaly time series forecasting[J]. Bulletin of Surveying and Mapping, 2014(1): 46−49. [11] 李晓静. 基于概率神经网络与多重分形的海温预测模型[J]. 统计与决策, 2017(18): 84−87.Li Xiaojing. Prediction model of sea surface temperature based on probabilistic neural network and multifractal[J]. Statistics and Decision, 2017(18): 84−87. [12] 陈亚飞, 王晓春, 刘屹岷. 中国近海海面高度异常资料再处理[J]. 海洋科学, 2016, 40(7): 151−159. doi: 10.11759/hykx20150818001Chen Yafei, Wang Xiaochun, Liu Yimin. Sea level anomaly reprocessing for Chinese coastal region[J]. Marine Sciences, 2016, 40(7): 151−159. doi: 10.11759/hykx20150818001 [13] Vybíral J. A variant of Schur's product theorem and its applications[J]. Advances in Mathematics, 2020, 368: 107140. doi: 10.1016/j.aim.2020.107140 [14] 邹颖俊, 王晓春, 何贤强. 基于统计学方法的HYCOM海洋预报结果评价[J]. 湘潭大学自然科学学报, 2018, 40(3): 104−108.Zou Yingjun, Wang Xiaochun, He Xianqiang. Evaluation of HYCOM ocean forecasting fields based on statistical method[J]. Natural Science Journal of Xiangtan University, 2018, 40(3): 104−108. [15] 梁广建, 苏晓亮, 李淑君, 等. 南海海域MODAS有效性检验及误差分析[J]. 海洋技术, 2013, 32(3): 40−45.Liang Guangjian, Su Xiaoliang, Li Shujun, et al. The validity examination and error analysis of MODAS in South China Sea[J]. Ocean Technology, 2013, 32(3): 40−45. [16] 张晓芳, 贾思洋, 张曙伟, 等. 海洋垂直剖面水温实时监测浮标系统研制与应用[J]. 海洋科学, 2016, 40(5): 109−114. doi: 10.11759/hykx20140507002Zhang Xiaofang, Jia Siyang, Zhang Shuwei, et al. Research and application of real-time monitoring buoy system for marine water temperatures of vertical profiles[J]. Marine Sciences, 2016, 40(5): 109−114. doi: 10.11759/hykx20140507002 -

 下载:
下载:


计量
- 文章访问数: 322
- HTML全文浏览量: 232
- PDF下载量: 35
- 被引次数: 0
